Simuler l'usinage d'un robot
Une fois la cellule du robot mise à jour, sélectionnez Utilitaires➔ Mettre à jour le projet d'usinage du robot (Ctrl+U) pour mettre à jour tous les programmes. Une coche verte s'affiche si les programmes sont réalisables avec les paramètres de cellule actuels. En cas de problème (singularités, limites d'axe ou problèmes de portée), une marque rouge s'affiche.
Double-cliquez sur le projet d'usinage du robot
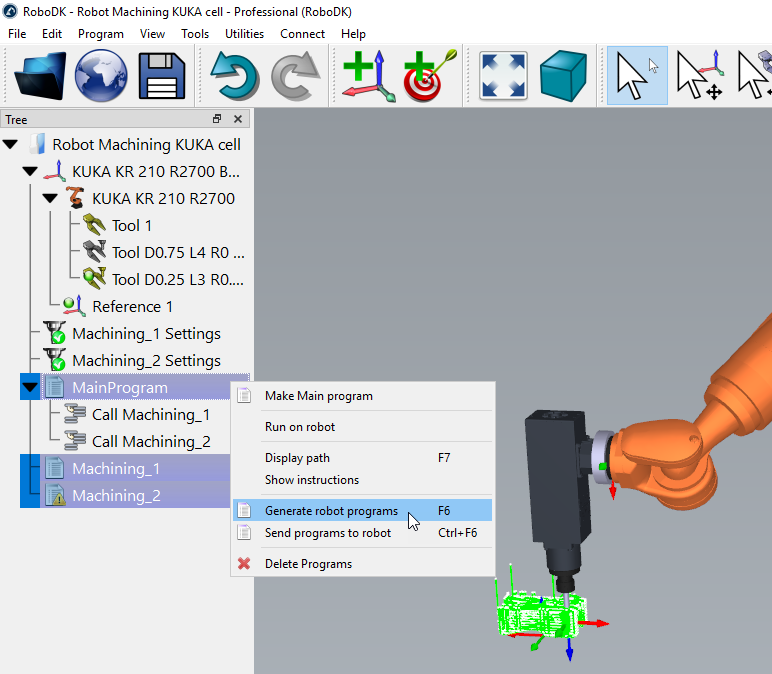
Cliquez avec le bouton droit de la souris sur un programme et sélectionnez Exécuter pour le simuler (ou double-cliquez sur le programme). Vous pouvez également sélectionner Générer un programme de robot (F6) pour générer le programme de robot pour votre contrôleur de robot. Pour plus d'informations sur la génération de programmes de robot, reportez-vous à la section Programmation hors ligne.
Vous pouvez également cliquer avec le bouton droit de la souris sur un programme et sélectionner Sélectionner le post-processeur pour changer de post-processeur. Vous trouverez plus d'informations sur les processeurs de post-production dans la section consacrée aux processeurs de post-production.