RoboDK Plugin for MecSoft
Introduction
L'Add-in RoboDK pour les logiciels MecSoft vous permet de configurer rapidement des projets d'usinage de robots directement à partir de RhinoCAM et Visual CAO. Avec l'intégration RoboDK pour le logiciel MecSoft CAO, vous pouvez facilement combiner les logiciels d'usinage RhinoCAM ou Visual CAO/FAO avec RoboDK pour simuler et programmer des bras de robots industriels pour l'usinage robotisé.
Vous trouverez plus d'informations sur RoboDK pour l'usinage de robots dans la section Usinage de robots.
Ce document décrit comment configurer le plugin RoboDK pour le logiciel Mecsoft et comment utiliser RhinoCAM et Visual CAO/FAO pour configurer des projets d'usinage de robots dans RoboDK.
Installation de RhinoCAM
Suivez ces étapes pour configurer automatiquement votre projet d'usinage de robot à partir de RhinoCAM :
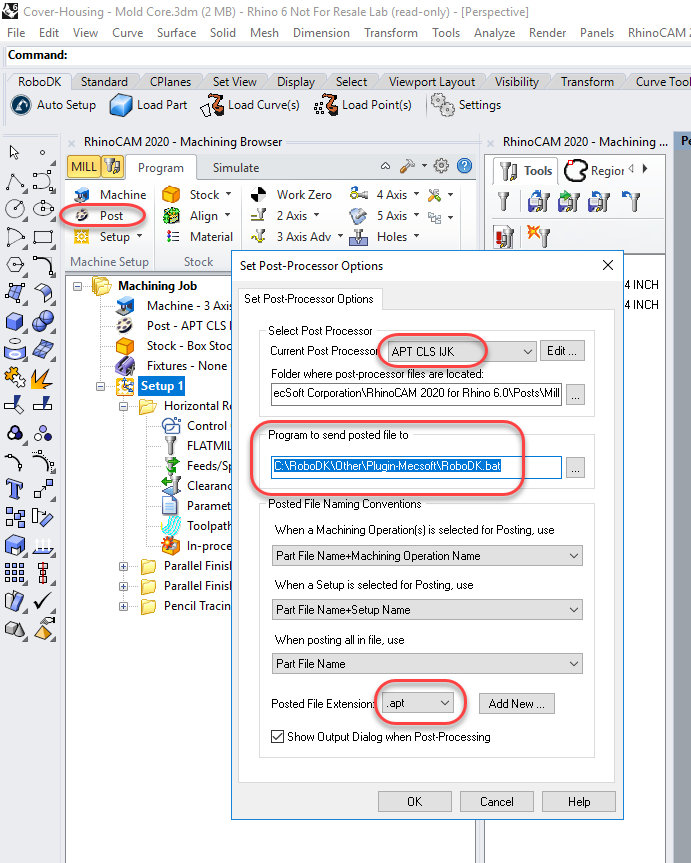
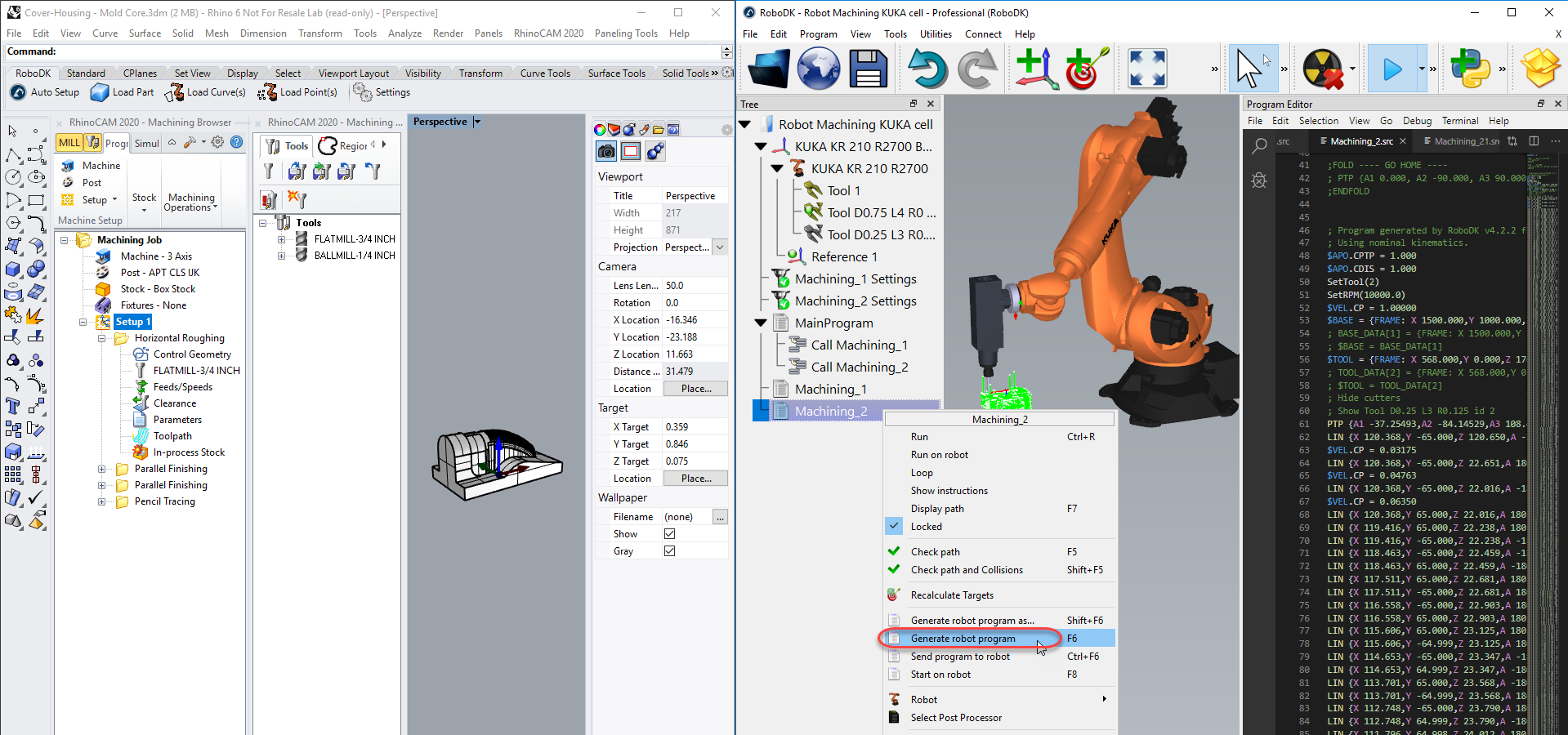
1.Sélectionnez l'onglet Programme dans le navigateur d'usinage RhinoCAM.
2.Sélectionnez un poste
3.Réglez le post-processeur sur APT CLS IJK
4.Définissez le programme auquel envoyer le fichier posté :
C:\RoboDK\NAutre\NPlugin-MecSoft\RoboDK.bat
5.Sélectionnez OK
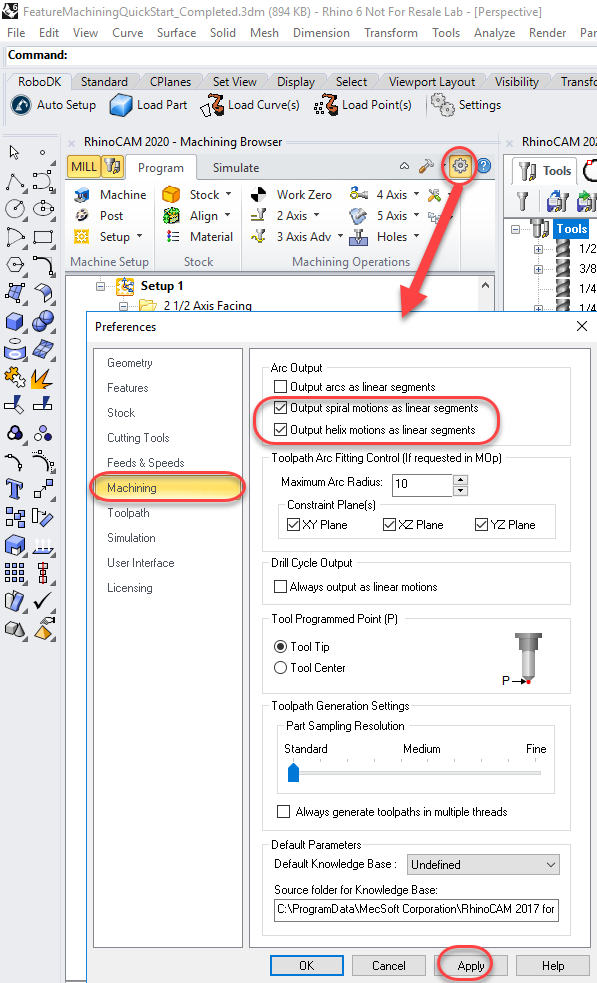
Vous devez également générer des hélices et des spirales en tant que mouvements linéaires (et non en tant que commande Helix). Les commandes Helix ne sont pas prises en charge par les robots industriels. Vous devez suivre les étapes suivantes pour modifier ce paramètre :
1.Sélectionnez le bouton Préférences FAO (comme indiqué dans l'image suivante).
2.Sélectionnez l'onglet Usinage
3.Contrôlez les mouvements en spirale de sortie en tant que segments linéaires.
4.Vérifiez les mouvements de l'hélice de sortie en tant que segments linéaires.
Flux de travail
Cette section décrit le comportement par défaut de RoboDK lorsque vous envoyez un parcours d'usinage à RoboDK (comme décrit dans la section précédente).
L'enregistrement d'un programme d'usinage dans RoboDK crée automatiquement un nouveau projet utilisant une cellule par défaut prête pour l'usinage robotisé. La cellule comprend un robot, un outil et un système de coordonnées/données qui représente la référence d'usinage du robot.
Si vous avez déjà une station RoboDK ouverte, elle utilisera le projet RoboDK existant sans modifier le robot, l'outil ou le système de coordonnées.
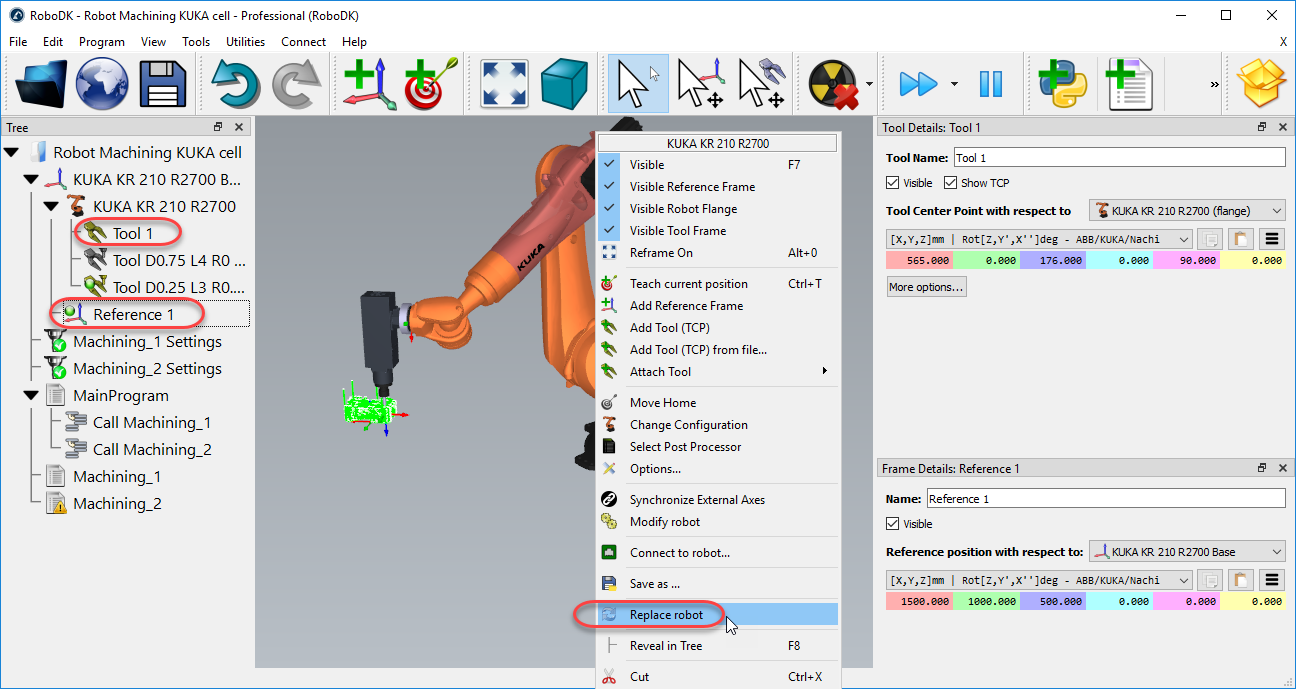
Vous pouvez facilement changer de robot, modifier l'outil et/ou le système de coordonnées. À titre d'exemple, suivez les étapes suivantes pour changer de robot :
1.Cliquez sur le robot avec le bouton droit de la souris
2.Sélectionnez Remplacer le robot (comme indiqué dans l'image suivante).
3.Sélectionnez le robot que vous souhaitez utiliser
Le programme d'installation de RoboDK ne fournit que quelques robots par défaut, mais il est possible de télécharger d'autres robots à partir de la bibliothèque en ligne.
Vous trouverez plus d'informations sur l'ajout d'un outil de robot dans la section Prise en main.
Enregistrez le projet pour conserver les modifications en sélectionnant Fichier➔ Enregistrer la station (Ctrl+S).
Simuler l'usinage d'un robot
Une fois la cellule du robot mise à jour, sélectionnez Utilitaires➔ Mettre à jour le projet d'usinage du robot (Ctrl+U) pour mettre à jour tous les programmes. Une coche verte s'affiche si les programmes sont réalisables avec les paramètres de cellule actuels. En cas de problème (singularités, limites d'axe ou problèmes de portée), une marque rouge s'affiche.
Double-cliquez sur le projet d'usinage du robot
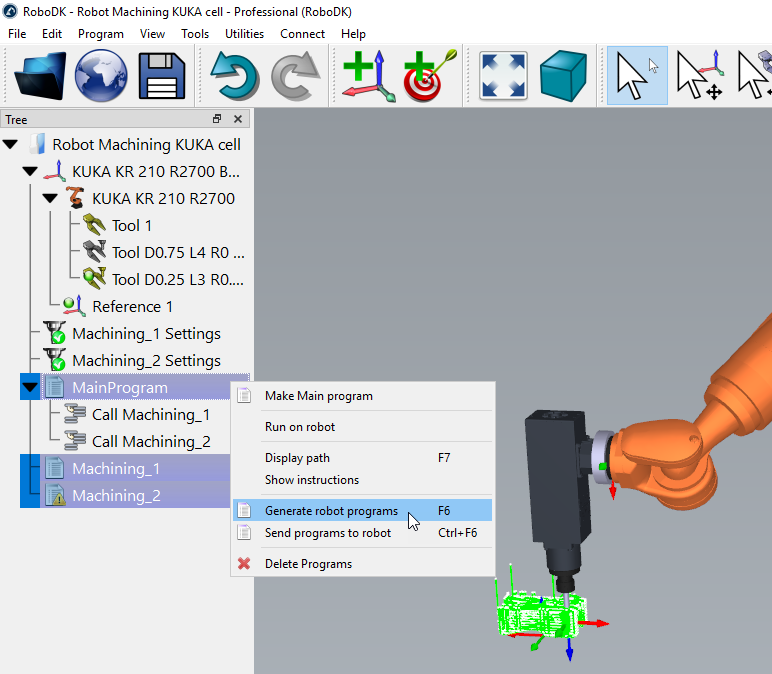
Cliquez avec le bouton droit de la souris sur un programme et sélectionnez Exécuter pour le simuler (ou double-cliquez sur le programme). Vous pouvez également sélectionner Générer un programme de robot (F6) pour générer le programme de robot pour votre contrôleur de robot. Pour plus d'informations sur la génération de programmes de robot, reportez-vous à la section Programmation hors ligne.
Vous pouvez également cliquer avec le bouton droit de la souris sur un programme et sélectionner Sélectionner le post-processeur pour changer de post-processeur. Vous trouverez plus d'informations sur les processeurs de post-production dans la section consacrée aux processeurs de post-production.
Générer des programmes de robots
Cliquez avec le bouton droit de la souris sur un programme dans RoboDK et sélectionnez Générer un programme de robot (F6) pour générer les programmes de robot pour l'usinage du robot.
Procédez comme suit dans RoboDK pour modifier l'emplacement de vos programmes de robot enregistrés :
1.Sélectionnez Outils-Options
2.Sélectionnez le programme
3.Sélectionnez Set à côté du dossier des programmes du robot
Exemples RhinoCAM
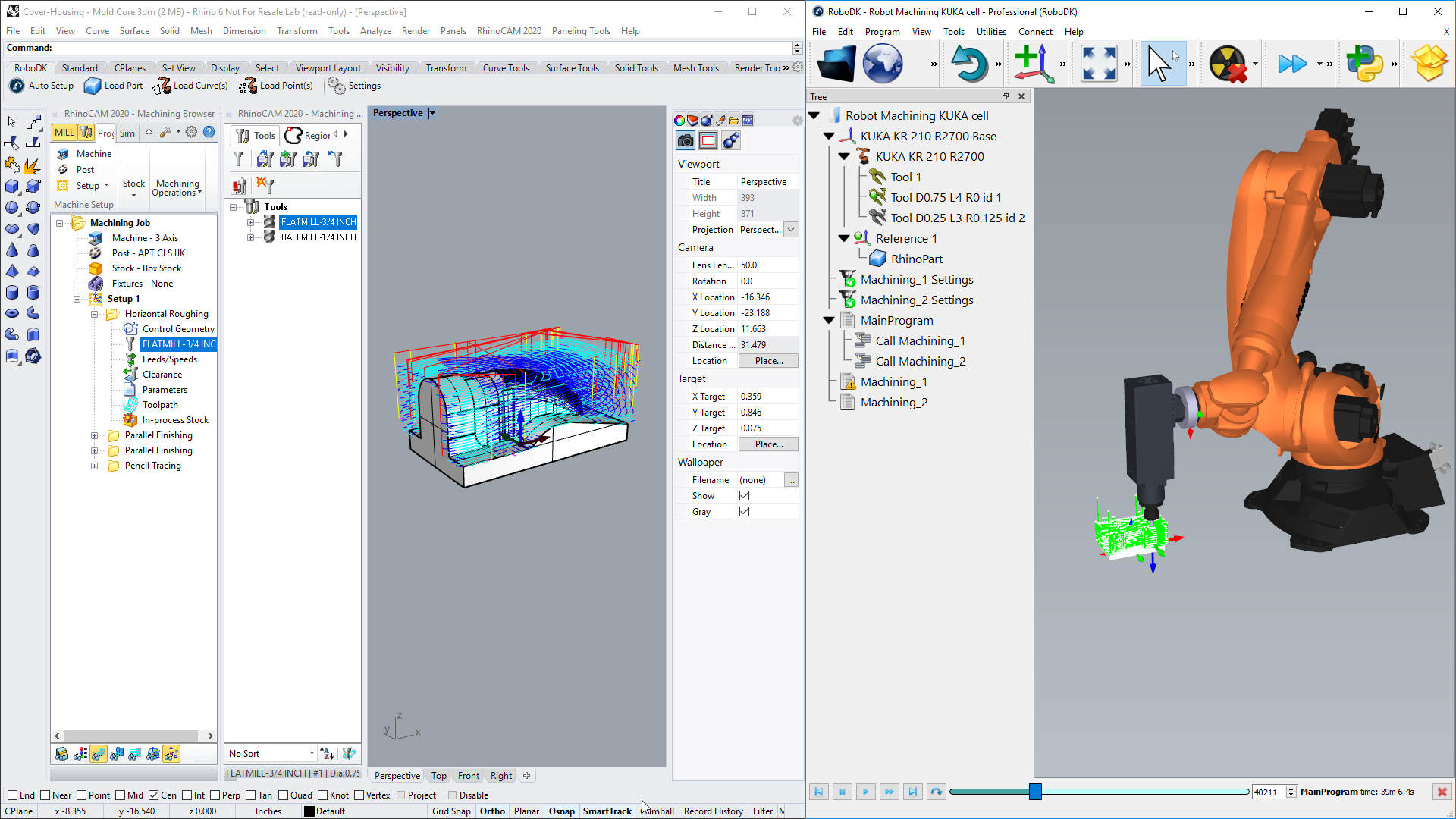
Usinage de robots à 3 axes avec RhinoCAM
Cet exemple montre comment créer un projet d'usinage de robot à 3 axes en utilisant RhinoCAM et RoboDK.
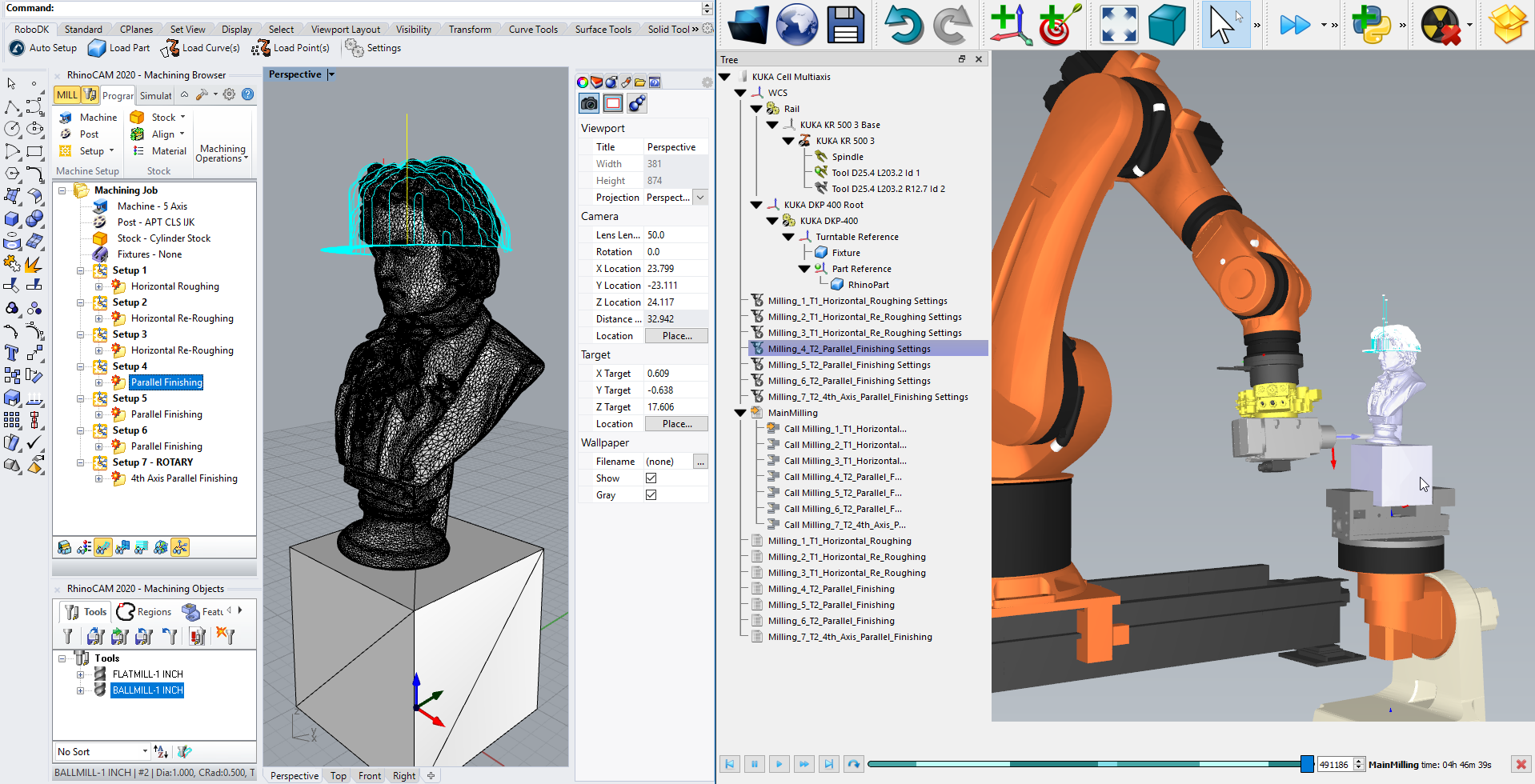
Usinage d'un robot 5 axes avec RhinoCAM
Cet exemple montre comment créer un projet d'usinage de robot à 5 axes pour la sculpture en utilisant RhinoCAM et RoboDK. Ce projet utilise un robot KUKA synchronisé avec un rail linéaire et une table tournante à deux axes (9 axes synchronisés).