Exemples
Cette section présente des exemples de base pour charger un projet Rhino dans RoboDK à des fins de simulation de robot et de programmation hors ligne.
Graver un dôme
Suivi de bandes d’un dôme
Cet exemple montre comment charger un exemple de station RoboDK (configuration par défaut) et suivre un ensemble de courbes définies dans Rhino avec le robot.
1.Charger l’exemple de Dôme dans Rhino.
2.Sélectionner dans le ruban l’onglet RoboDK et sélectionner 
3.Sélectionner Load Project…
4.Sélectionner Default Setup. RoboDK démarrera et chargera un projet d’essai avec un robot KUKA, un outil (une broche comme outil 1) et un repère (référence 1)
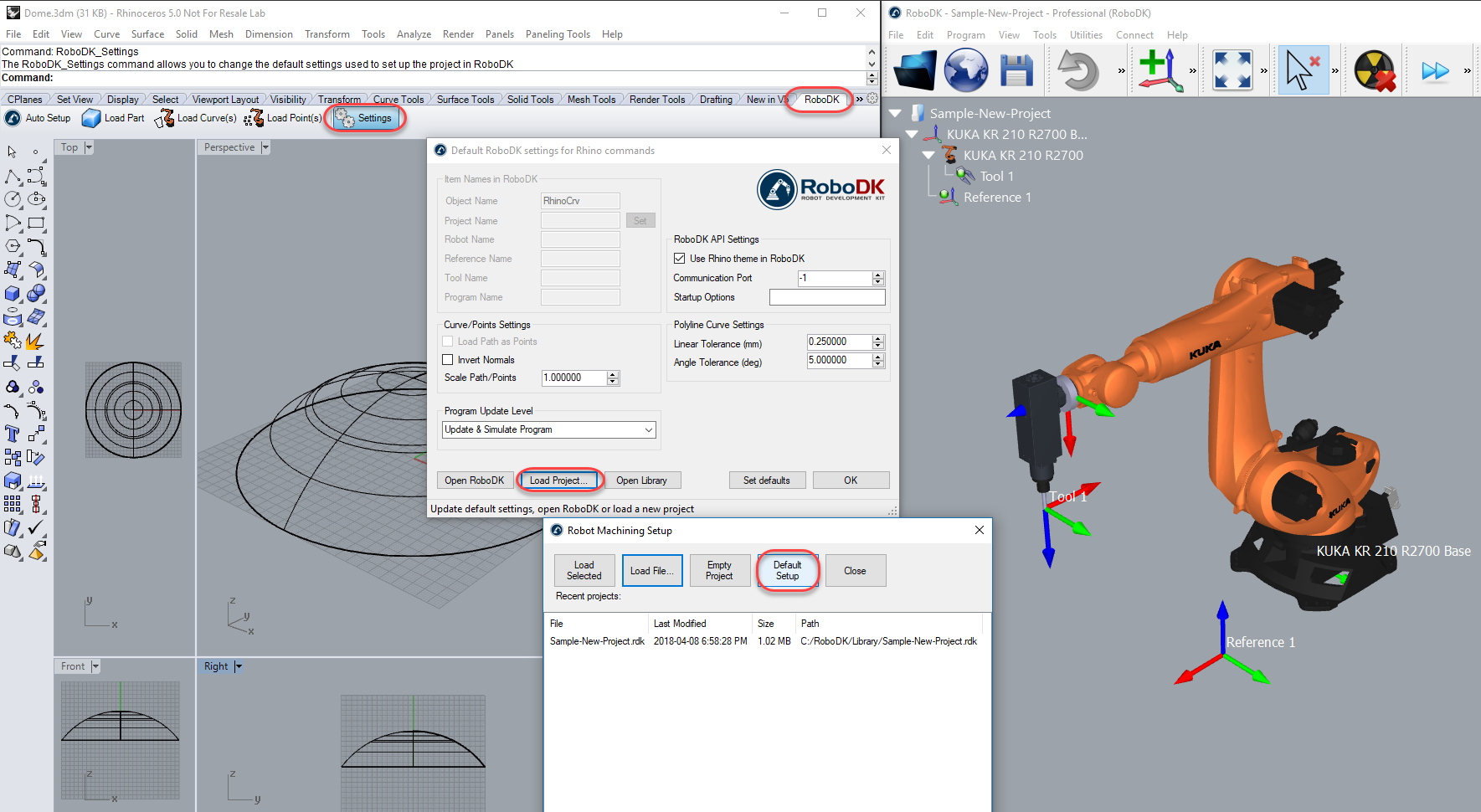
5.Fermer la fenêtre de paramètres ou sélectionner OK.
6.Sélectionner le bouton 
7.Sélectionner toutes les courbes et surfaces et appuyer sur Entrer (ou faire un clic droit). Le projet sera chargé dans RoboDK comme indiqué dans l’image suivante.
Vous voyez la partie chargée sur le repère actif (Référence 1) et un nouveau projet de suivi de Courbe dans RoboDK qui suit les courbes avec l’outil du robot actif (Outil 1).
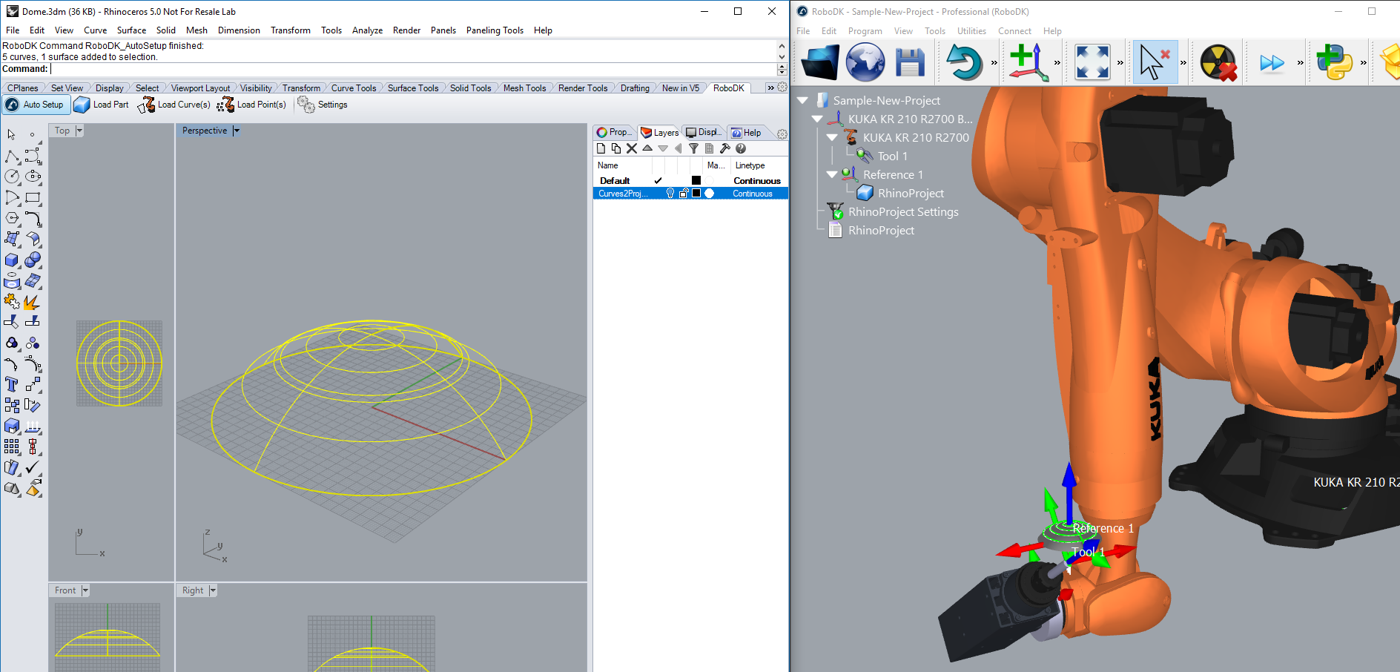
Nous pouvons également voir que les normales de surface ont été extraites dans la direction opposée. Suivez ces étapes pour résoudre ce problème
8.Sélectionner
9.Cocher l’option Invert Normals.
10.Sélectionner OK.
11.Répéter les étapes 6 et 7.
Vous voyez maintenant les normales de surface basculer et le mouvement d’approche venir du haut de la pièce. Le robot devrait être en mesure de se déplacer le long du parcours outils sans aucun problème
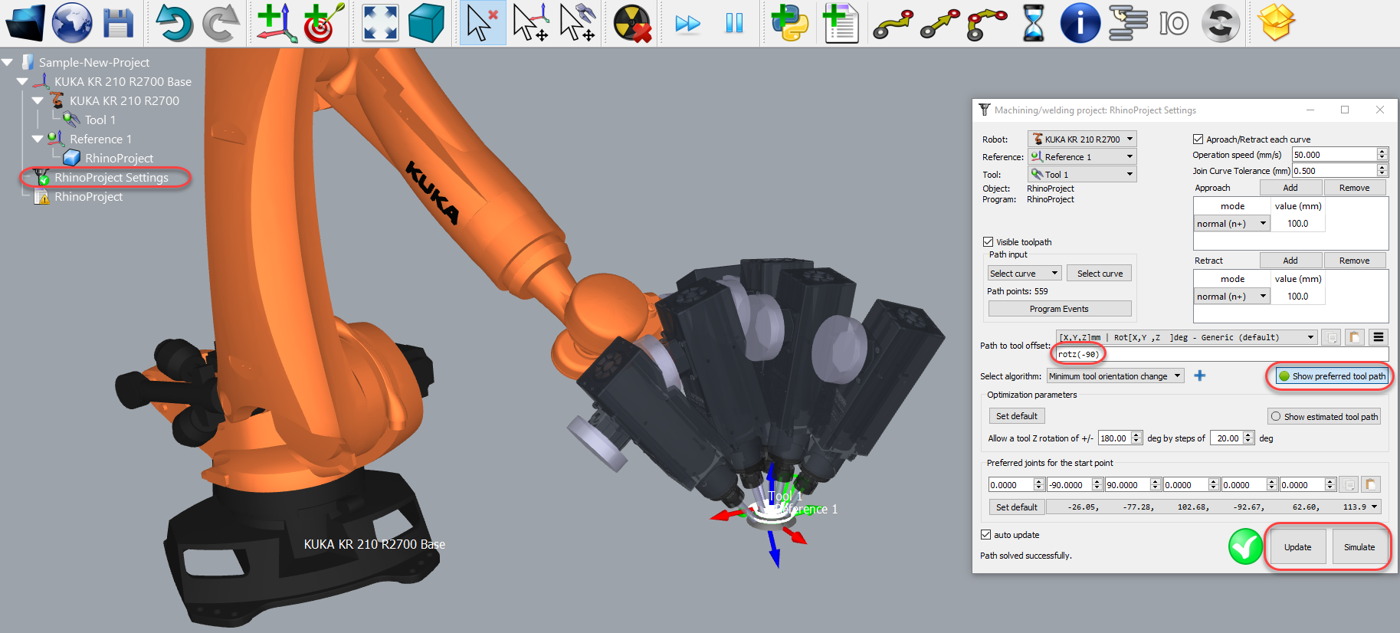
Double-cliquer sur 
Par exemple, sélectionner Show preferred tool path pour voir et modifier l’orientation par défaut de l’outil par rapport à la pièce. Modifier la valeur de décalage du parcours outil (Path to tool offset) pour définir une rotation supplémentaire. Il est possible d’entrer une nouvelle valeur ou tout simplement utiliser la molette de la souris pour voir un aperçu rapide du résultat.
Plus d’informations disponible pour modifier ces paramètres dans la section usinage robot.
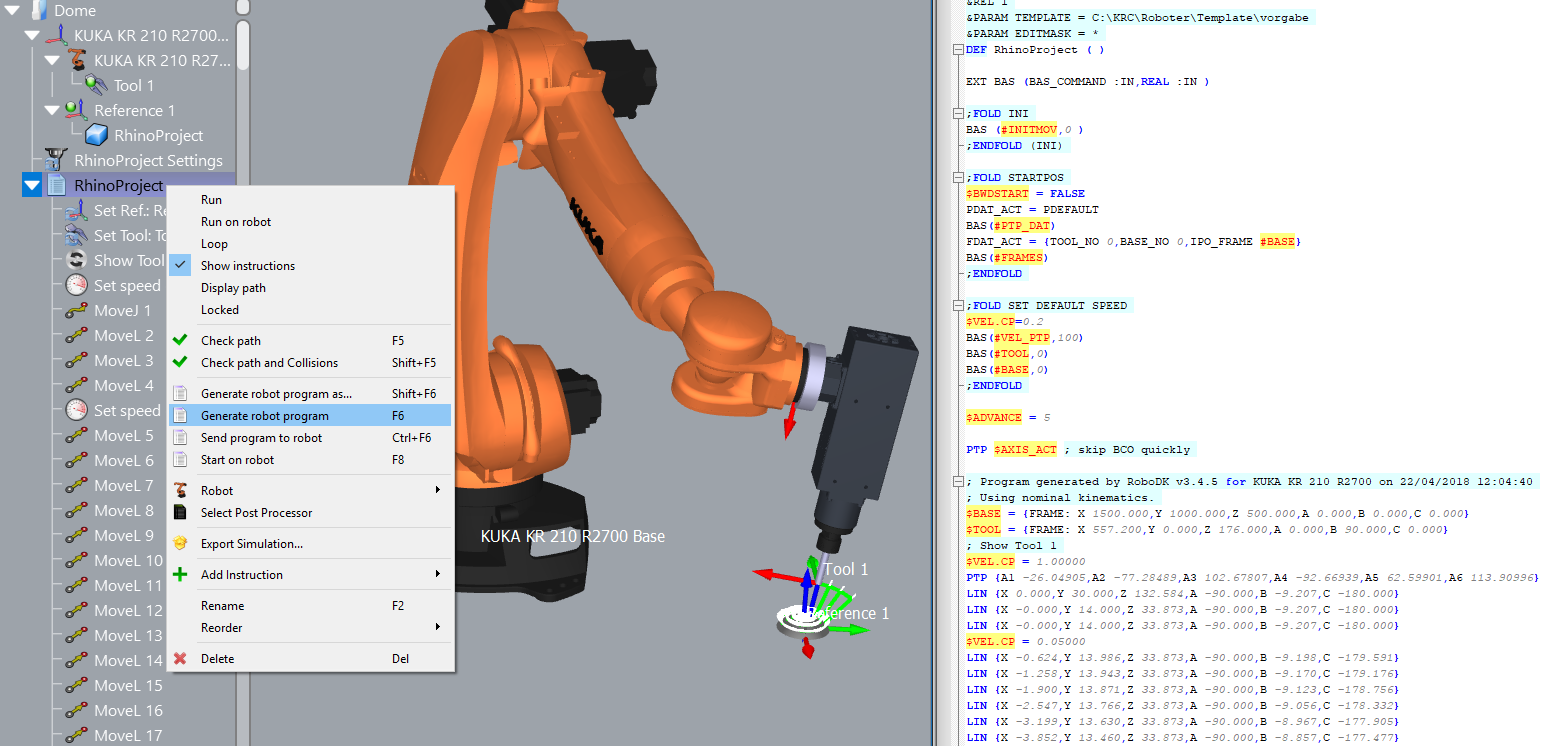
Enfin, lorsque la simulation produit le résultat souhaité, vous pouvez générer le programme ou exporter la simulation :
12.Faire un clic droit sur le programme RhinoProject
13.Sélectionner Généré programme robot (F6). Le programme robot sera généré et affiché.
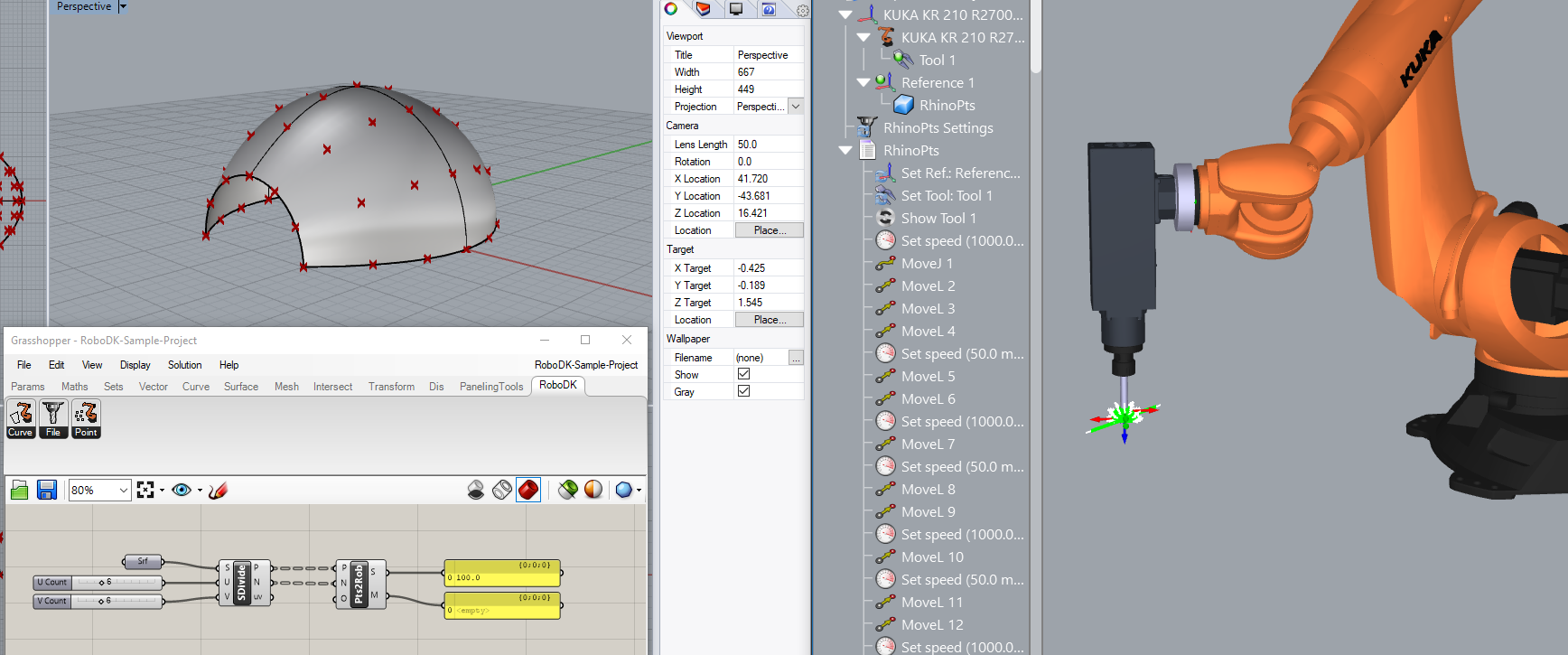
Exemple Grasshopper
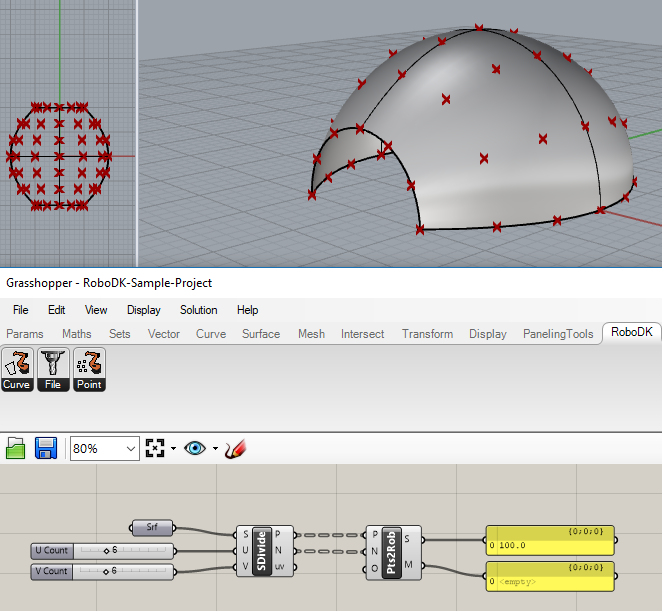
Cet exemple montre comment utiliser le plug-in RoboDK pour Grasshopper en divisant une surface comme une grille de points et en les suivants avec un robot pour une opération de forage avec RoboDK :
1.Charger l’exemple de Grasshopper fourni avec le plug-in RoboDK (fichier 3dm et gh).
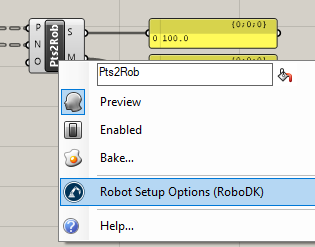
2.Faire un clic droit sur le composant Pts2rob et sélectionner Robot Setup Options (RoboDK). Sélectionner Load Project… et sélectionner Default Setup pour charger un exemple de station RoboDK (même exemple de projet montré dans la section précédente).
Nous pouvons optionnellement définir le nom de l’objet comme une entrée de composant (O). Nous pouvons également spécifier un projet dans les options du composant pour que le projet RoboDK souhaité soit utilisé avec chaque composant.
3.Dans Grasshopper, sélectionner Solution ➔ Recompute (F5) pour mettre à jour la pièce et le programme dans RoboDK