Add-in RoboDK pour Siemens Solid Edge
L'Add-in RoboDK pour Siemens Solid Edge vous permet de combiner les fonctions de modélisation CAO 3D de Solid Edge avec RoboDK pour la simulation de robots, la programmation hors ligne et la fabrication de robots.
Avec l'Add-in RoboDK pour Solid Edge, vous pouvez facilement charger dans RoboDK des modèles 3D créés dans Solid Edge. Ce plug-in vous permet de programmer plus de 500 bras robotiques directement à partir des conceptions Solid Edge.
Les robots peuvent être facilement programmés comme des machines à 5 axes pour une grande variété d'applications de fabrication telles que le perçage, le soudage, l'ébarbage, l'impression 3D ou l'usinage robotisé. Pour plus d'informations, consultez la section sur l'usinage robotisé.
La section relative aux post-processeurs de robots présente une liste des marques de robots et des contrôleurs pris en charge. Il est également possible de modifier ou de créer de nouveaux post-processeurs pour personnaliser la génération de programmes.
L'Add-in RoboDK pour Solid Edge fonctionne avec Solid Edge et les versions ultérieures. L'utilisation de l'Add-in RoboDK pour Solid Edge ne devrait pas être limitée si vous disposez déjà d'une licence RoboDK.
Installer
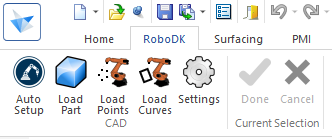
Si vous avez déjà installé le logiciel RoboDK après avoir installé Siemens Solid Edge, le plug-in RoboDK pour Solid Edge devrait être disponible dans Solid Edge. Le plug-in RoboDK pour Solid Edge doit être visible dans la barre d'outils.
Barre d'outils Solid Edge
La barre d'outils RoboDK pour Solid Edge comprend 5 commandes pour la CAO.
●
●
●
●
●
La principale différence entre Auto Setup et Load Curve(s) ou Load Point(s) est que Auto Setup charge la pièce et crée un nouveau projet de suivi de courbe/point. L'utilisation de Load Curve(s) ou Load Point(s) est plus rapide et ne fait que mettre à jour les caractéristiques géométriques existantes dans RoboDK, en conservant les paramètres définis précédemment.
Paramètres
Vous pouvez modifier les paramètres par défaut du plug-in RoboDK en sélectionnant le bouton Paramètres.
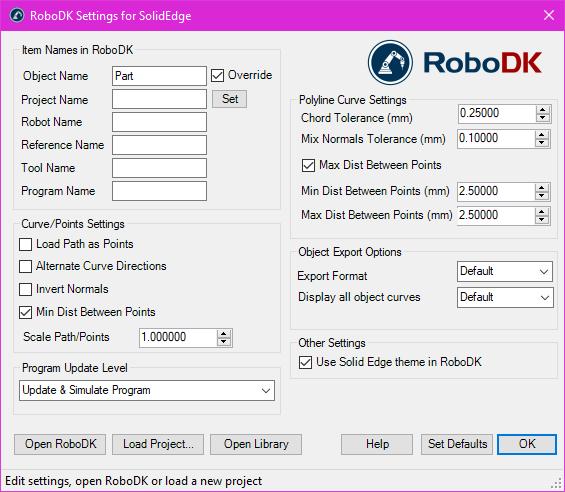
●Nom de l'objet - Définissez le nom de l'objet courbe/points qui sera chargé dans RoboDK. Si ce champ est laissé vide, le nom de la pièce ou du fichier d'assemblage sera utilisé.
●Remplacer - Remplacer l'objet chargé précédemment dans RoboDK s'il existe une correspondance de nom.
●Nom du projet - Définissez le nom/le parcours du projet/de la station RoboDK (fichier .RDK) à utiliser. Si le fichier est déjà chargé, le projet existant sera utilisé. Si le projet ouvert dans RoboDK ne correspond pas au nom du fichier, le projet sera ouvert si le parcours complet est spécifié.
●Nom du robot - Définissez le nom du robot qui sera utilisé dans RoboDK (si vous avez plus d'un robot dans votre projet). Le nom du robot doit correspondre au nom visible dans l'arborescence des stations de RoboDK. Laissez cette valeur vide (par défaut) pour utiliser le premier ou le seul robot disponible.
●Nom de référence - Définissez le nom du système de coordonnées pour placer le parcours par rapport au robot. Le nom doit correspondre au nom visible dans l'arborescence de la station RoboDK. Si aucun nom n'est fourni, le système de coodonées actif
●Nom de l'outil - Définissez le nom de l'outil (CDO) à utiliser avec le robot pour suivre le parcours. Le nom doit correspondre au nom visible dans l'arborescence de la station RoboDK. Si aucun nom n'est fourni, le système de coordonnées d'outil actif
●Nom du programme - Définissez le nom du fichier de programme qui sera généré.
●Charger le parcours en tant que points - Cochez cette option pour convertir une courbe en points, de sorte qu'un projet de suivi de points sera créé dans RoboDK. Cette option est utile pour les opérations de fabrication telles que le perçage. Décochez cette option pour charger le parcours en tant que projet de suivi de courbe.
●Alternate Curve Directions - Cochez cette option pour alterner la direction du mouvement à chaque passage (motif en zig-zag).
●Inverser les normales - Cochez cette option pour inverser les normales de surface calculées. L'orientation de l'outil du robot sera alors inversée.
●Utiliser le thème Solid Edge dans RoboDK - Démarrez RoboDK avec le thème Solid Edge. Cela inclut la modification du comportement de la souris pour la navigation 3D et la couleur d'arrière-plan. Ces paramètres peuvent être modifiés dans le menu de RoboDK : Outils-Options.
●Port de communication - Définissez le port de communication pour communiquer avec RoboDK. Plusieurs instances de RoboDK peuvent fonctionner en même temps et utiliser des configurations différentes si un port différent est utilisé. Lorsque cette valeur est définie sur -1 (par défaut), le port par défaut est utilisé (20500).
●Options de démarrage - Définissez les arguments à transmettre à RoboDK lors de son premier démarrage. Par exemple, pour démarrer RoboDK discrètement, vous pouvez définir '/NOSPLASH /NOSHOW /HIDDEN'. Les programmes peuvent être générés même si RoboDK n'est pas affiché. Pour plus d'informations, consultez la section Ligne de commande de l'API RoboDK.
●Tolérance de corde (mm) - Définit la précision avec laquelle les courbes sont divisées en un ensemble de points.
●Tolérance de mélange des normales (mm) - Définissez la tolérance de distance utilisée pour mélanger les calculs de normales entre plusieurs surfaces.
●Format d'exportation - Sélectionnez le format d'exportation pour charger la pièce dans RoboDK.
●Afficher toutes les courbes de l'objet - Affiche les courbes chargées dans RoboDK même si elles ne sont pas sélectionnées. Vous pouvez modifier ce paramètre dans RoboDK (Outils-Options-Affichage-Affichage des courbes).
Boutons :
●Open RoboDK - Ouvrez un projet dans RoboDK... Une nouvelle fenêtre s'ouvre avec des options supplémentaires.
●Charger le projet ... - Chargez le projet RoboDK (fichier RDK) que vous souhaitez utiliser pour votre projet actuel.
●Open Library - La bibliothèque en ligne de RoboDK.
●Définir les paramètres par défaut - Définit les paramètres par défaut du composant.
●OK - Appliquer ces paramètres et fermer cette fenêtre. Si vous ne sélectionnez pas OK, les paramètres que vous avez modifiés ne seront pas appliqués.
Exemples
Cette section présente des exemples de base pour générer des simulations et des programmes de robot directement à partir de Siemens Solid Edge en utilisant l'Add-in RoboDK.
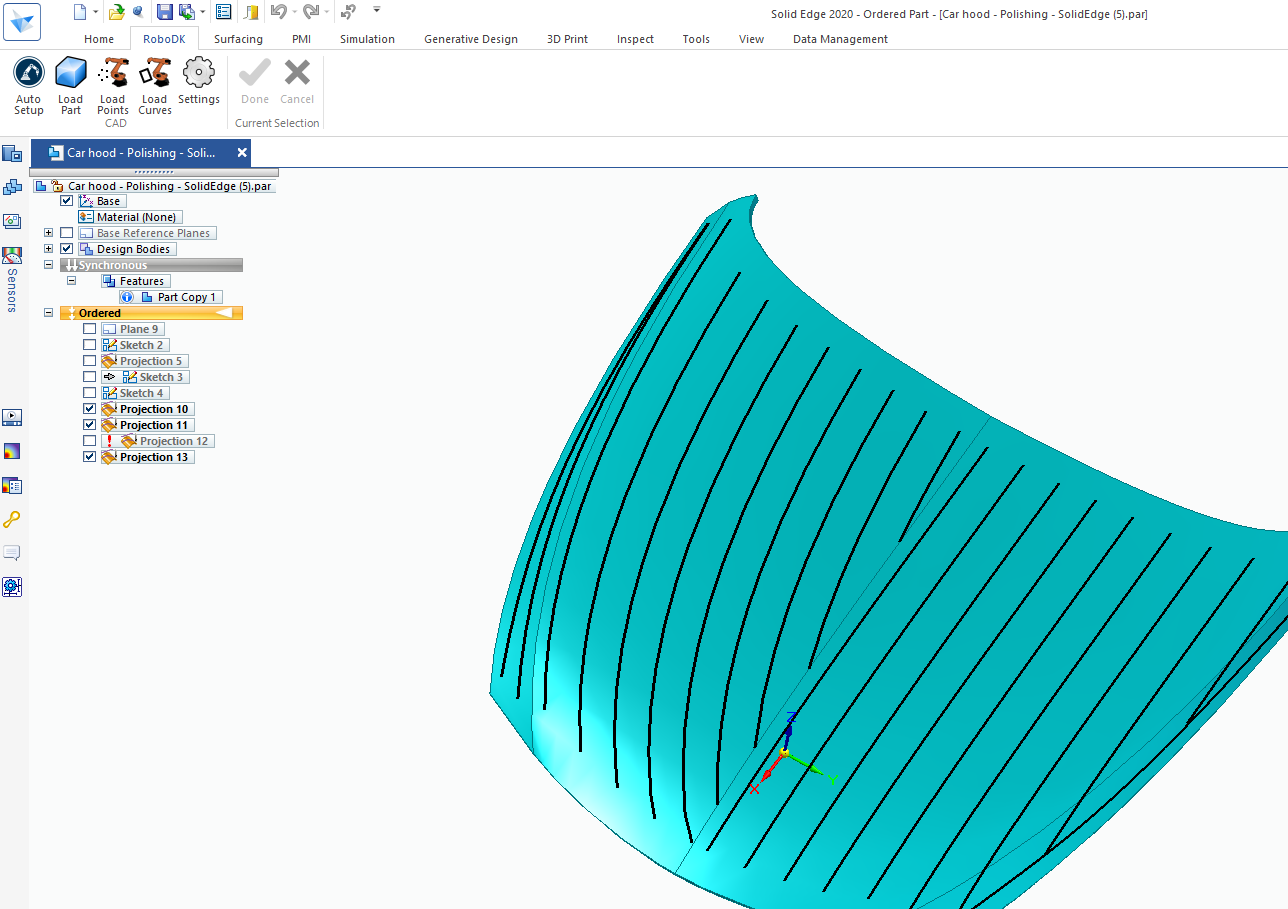
Polissage robotisé
Le tutoriel vidéo suivant montre comment vous pouvez programmer un robot pour qu'il suive un parcours d'outil à 5 axes afin de polir des surfaces complexes en utilisant Solid Edge et RoboDK.
Installation manuelle
Cette section décrit les étapes de l'installation manuelle du plug-in RoboDK pour Solid Edge. Vous devez suivre ces étapes si le plug-in RoboDK pour Solid Edge n'a pas été automatiquement installé par défaut à l'aide du programme d'installation de RoboDK :
1.Assurez-vous que le logiciel Siemens Solid Edge est installé.
2.Téléchargez et installez la dernière version de RoboDK.
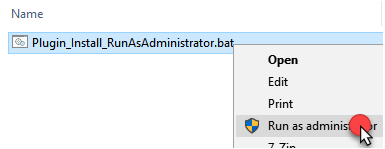
3.Localisez le dossier C:\RoboDK\Autre\Plugin-SolidEdge\N et exécutez le fichier Plugin_Install_RunAsAdministrator.bat en tant qu'administrateur.
et exécutez le fichier Plugin_Install_RunAsAdministrator.bat en tant qu'administrateur : Cliquez avec le bouton droit de la souris sur le fichier BAT et sélectionnez Exécuter en tant qu'administrateur.
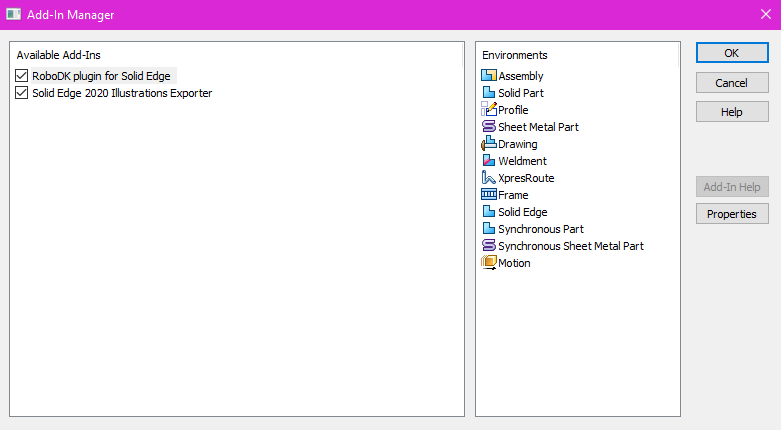
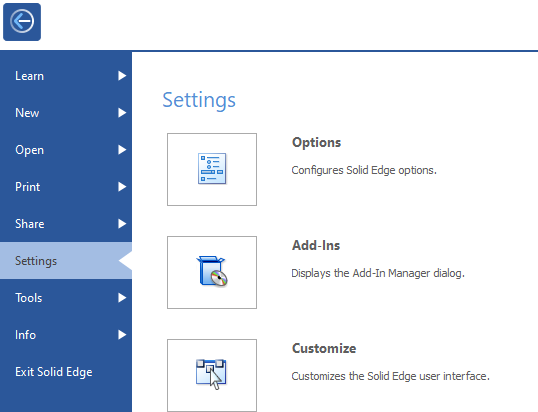
4.Sélectionnez Settings➔ Add-ins dans le menu principal.
5.Activez le plugin RoboDK pour Solid Edge pour voir la barre d'outils RoboDK dans Solid Edge.