Introduction à hyperMILL
L'Add-in RoboDK pour OpenMind hyperMILL vous permet de configurer rapidement des projets d'usinage robotisé directement à partir d'hyperMILL. Avec l'intégration RoboDK pour OpenMind, vous pouvez facilement combiner le logiciel d'usinage CAO/FAO hyperMILL avec RoboDK pour simuler et programmer des bras de robots industriels pour l'usinage robotisé.
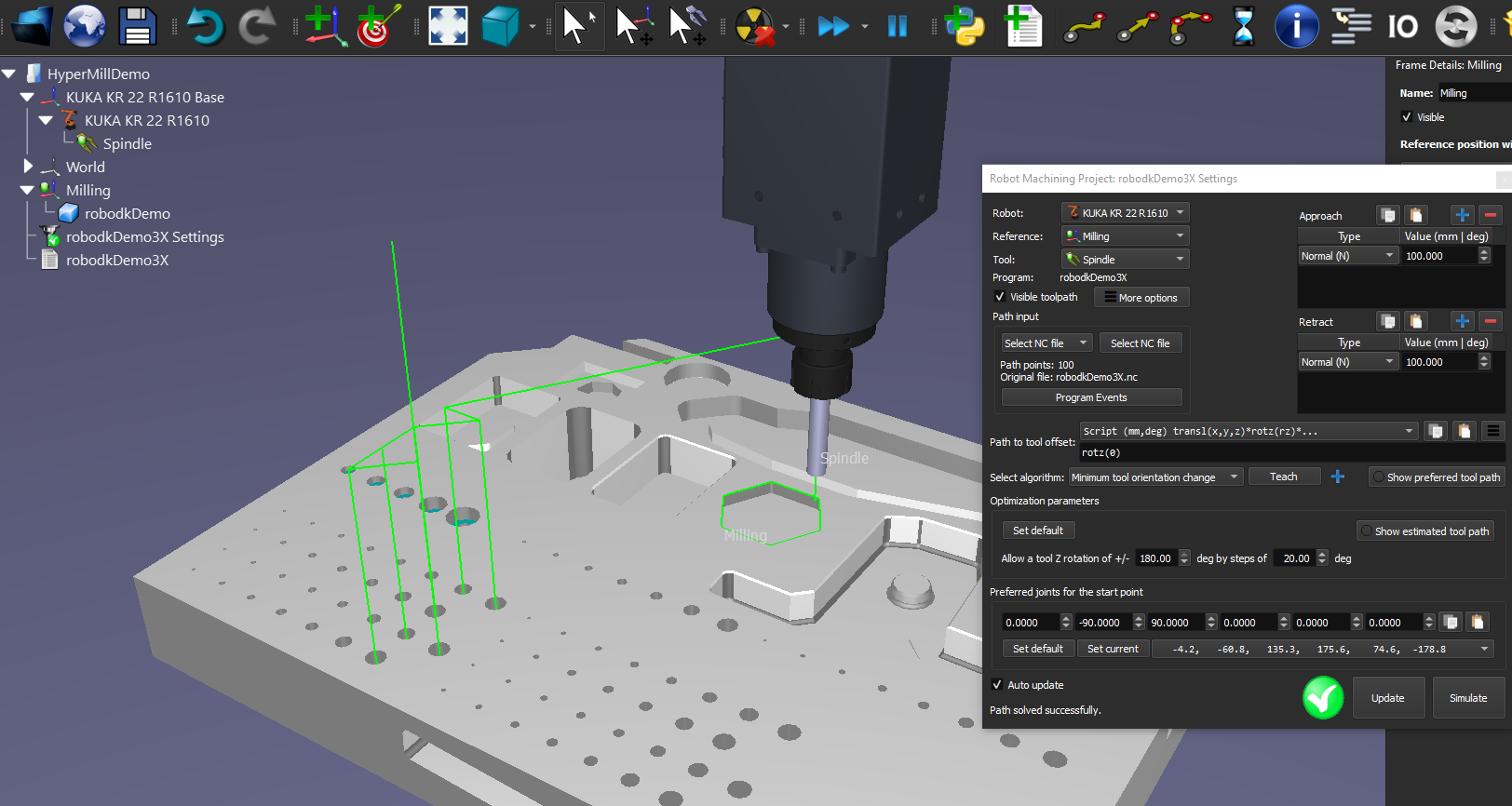
Avec cet Add-in d'hyperMILL, vous pouvez facilement générer des programmes sans erreur pour l'usinage robotisé directement à partir d'hyperMILL. RoboDK prend également en charge les fichiers d'usinage APT CLS et G-code standard.
Vous trouverez de plus amples informations sur RoboDK pour l'usinage de robots dans la section consacrée à l'usinage de robots. Pour en savoir plus sur hyperMILL et hyperCAD-s, visitez https:/www.openmind-tech.com/en.html.
Ce document décrit comment configurer le plugin RoboDK pour le logiciel hyperMILL et comment utiliser hyperMILL pour configurer des projets d'usinage de robots dans RoboDK.