RoboDK Plugin for hyperMILL
Introduction à hyperMILL
L'Add-in RoboDK pour OpenMind hyperMILL vous permet de configurer rapidement des projets d'usinage robotisé directement à partir d'hyperMILL. Avec l'intégration RoboDK pour OpenMind, vous pouvez facilement combiner le logiciel d'usinage CAO/FAO hyperMILL avec RoboDK pour simuler et programmer des bras de robots industriels pour l'usinage robotisé.
Avec cet Add-in d'hyperMILL, vous pouvez facilement générer des programmes sans erreur pour l'usinage robotisé directement à partir d'hyperMILL. RoboDK prend également en charge les fichiers d'usinage APT CLS et G-code standard.
Vous trouverez de plus amples informations sur RoboDK pour l'usinage de robots dans la section consacrée à l'usinage de robots. Pour en savoir plus sur hyperMILL et hyperCAD-s, visitez https:/www.openmind-tech.com/en.html.
Ce document décrit comment configurer le plugin RoboDK pour le logiciel hyperMILL et comment utiliser hyperMILL pour configurer des projets d'usinage de robots dans RoboDK.
hyperMILL Setup
Suivez ces étapes pour installer l'Add-in RoboDK pour hyperMILL.
1.Téléchargez le plugin
https://robodk.com/files/upload/hyperMILL_AddIn_RoboDK.zip
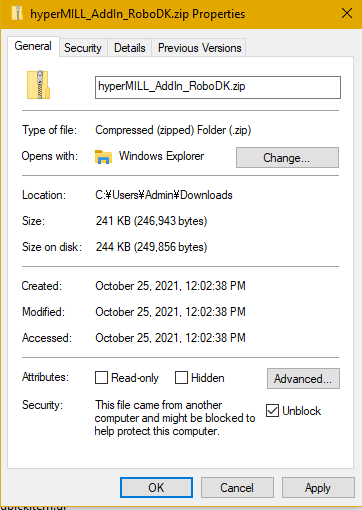
2.Marquez le plugin comme sûr : faites un clic droit sur le dossier ZIP, sélectionnez Propriétés et cochez l'option Débloquer.
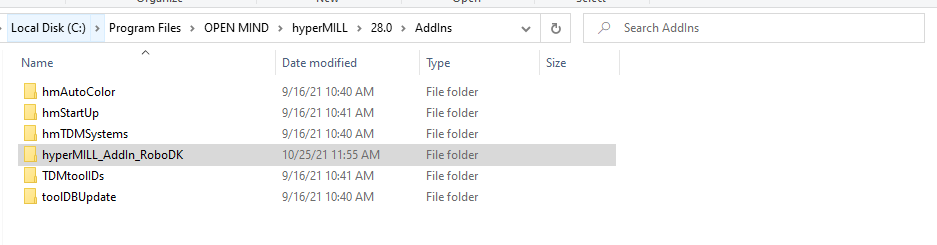
3.Extrayez le contenu du dossier ZIP dans "C:\NProgram Files\NOPEN MIND\NhyperMILL\N28.0\NAddIns", ou dans votre répertoire d'installation équivalent.
Le dossier du plugin doit ressembler à l'image suivante.
hyperMILL Workflow
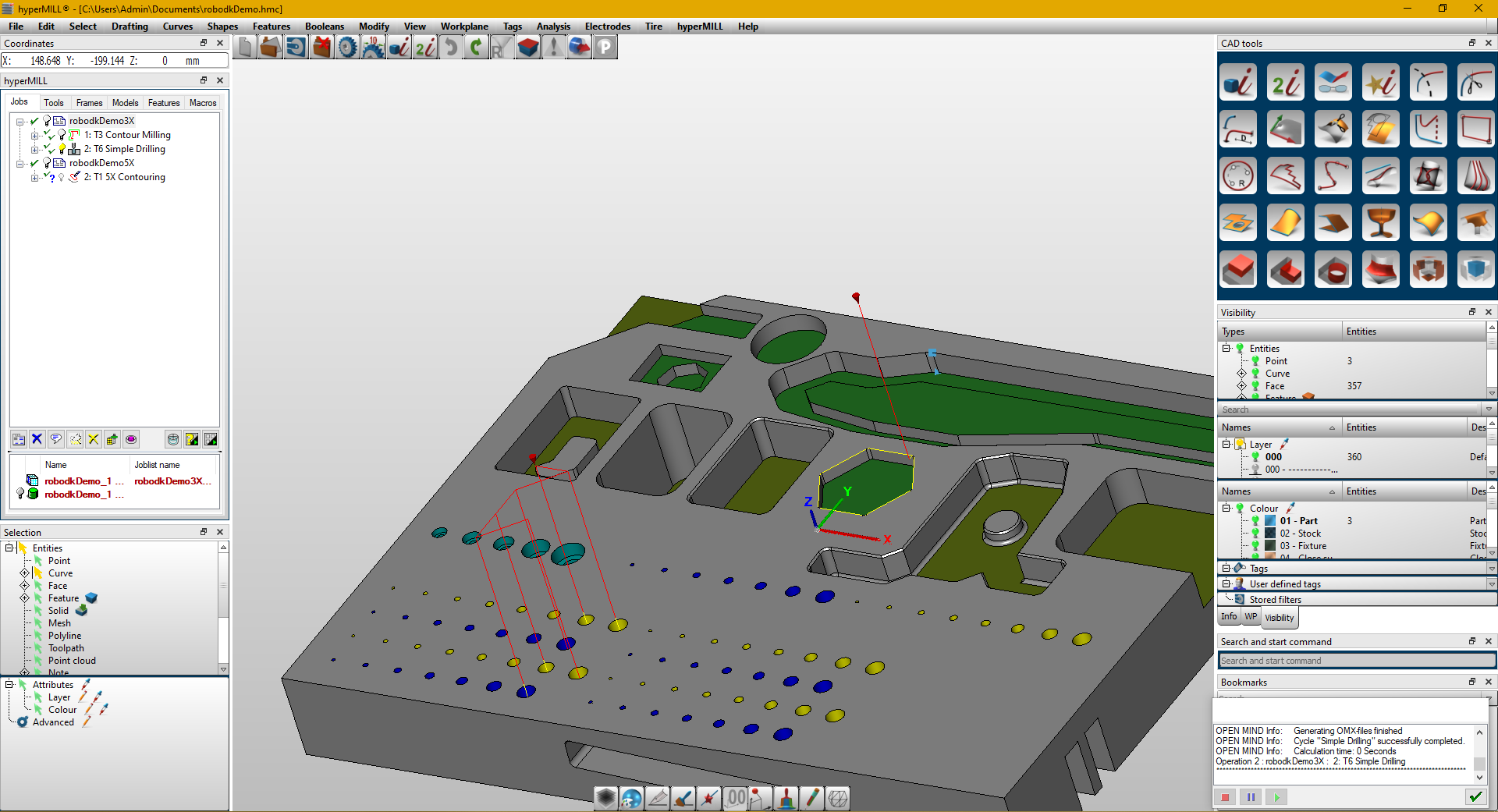
Dans hyperMILL/hyperCAD-S, vous pouvez utiliser le plugin RoboDK pour faciliter l'envoi de travaux d'usinage à RoboDK. Vous pouvez ainsi simuler et programmer des robots pour l'usinage robotisé.
Suivez ces étapes pour configurer automatiquement votre projet d'usinage robotisé à partir d'hyperMILL/hyperCAD-S :
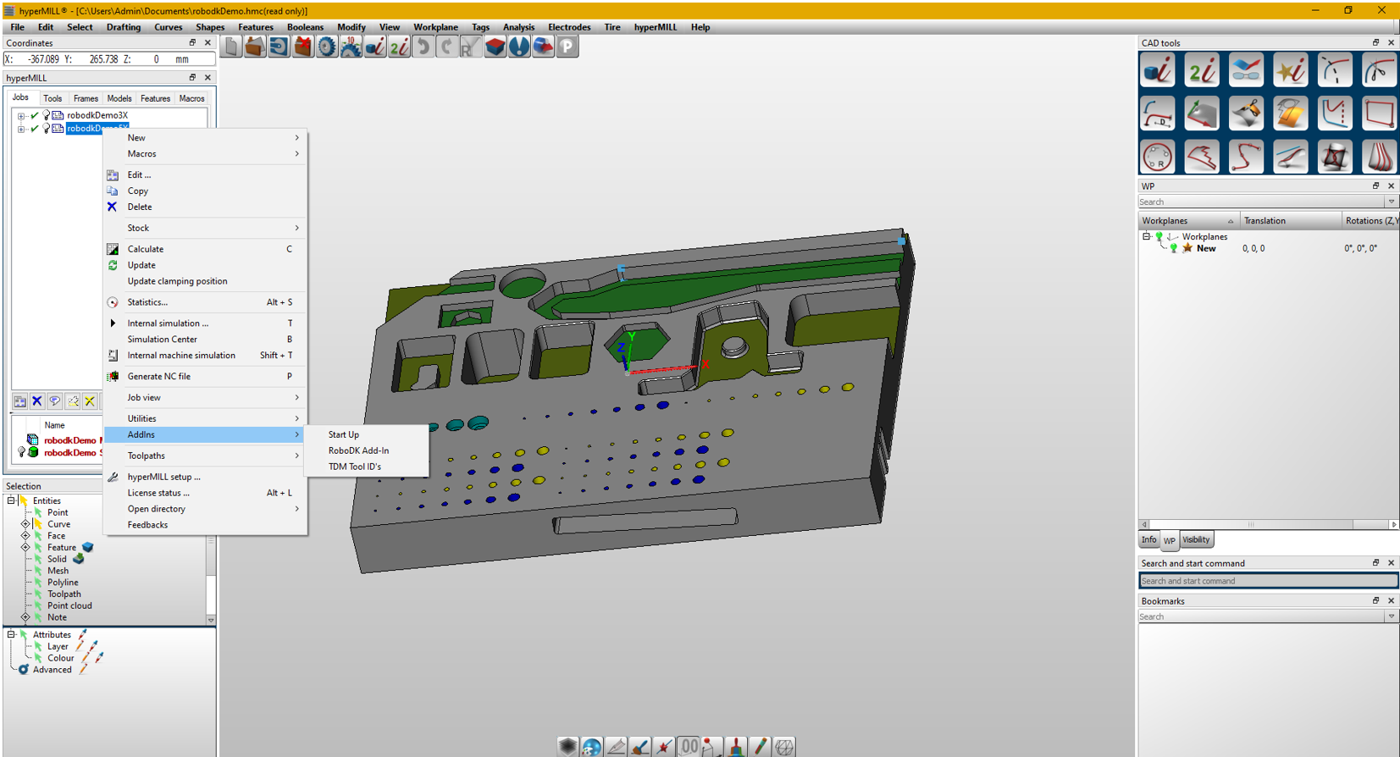
1.Cliquez avec le bouton droit de la souris sur votre travail.
2.Sélectionnez Add-in.
3.Sélectionnez l'Add-in RoboDK.
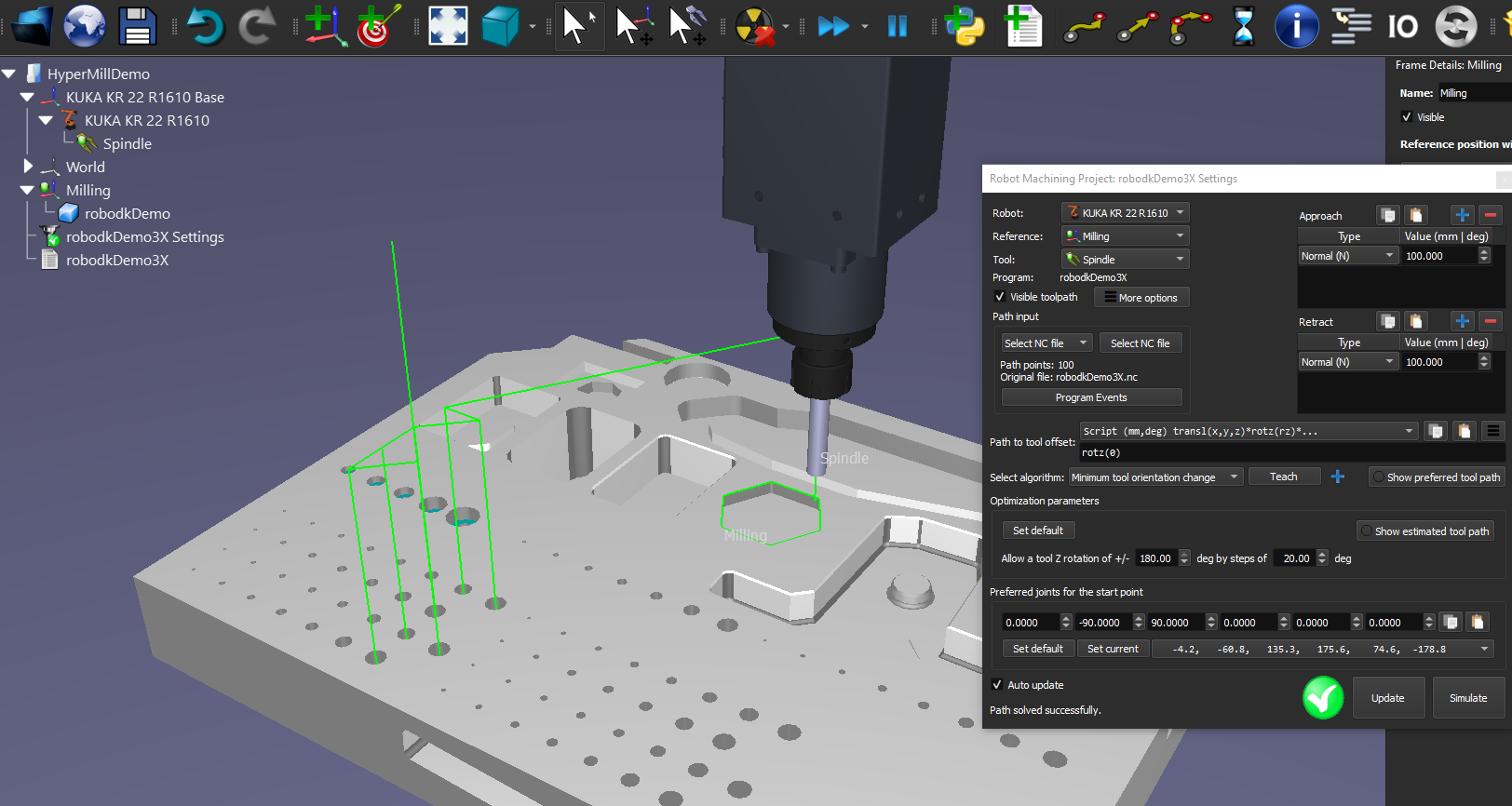
Une coche verte s'affiche si le programme est réalisable avec le robot sélectionné. En cas de problème (singularités, limites d'axe ou problèmes de portée), une marque rouge s'affiche, accompagnée d'un message indiquant le problème.
Double-cliquez sur le projet d'usinage du robot
Cliquez avec le bouton droit de la souris sur un programme et sélectionnez Exécuter pour le simuler (ou double-cliquez sur le programme). Vous pouvez également sélectionner Générer un programme de robot (F6) pour obtenir le programme de robot qui doit être chargé sur le système de commande du robot. Pour plus d'informations sur la génération de programmes de robot, reportez-vous à la section Programmation hors ligne.
Si nécessaire, cliquez avec le bouton droit de la souris sur un programme et sélectionnez Sélectionner le post-processeur pour modifier le post-processeur. Cette étape peut vous aider à personnaliser l'apparence de votre code généré. Vous trouverez de plus amples informations sur la sélection et la personnalisation des post-processeurs dans la section consacrée aux post-processeurs.