Exemple de Modification
Cette section montre comment effectuer de petites modifications à l’intérieur d’un post processeur existant.
Comme exemple, on appliquera les changements suivants au post processeur KUKA KRC4 :
●Modifier la vitesse maximale à 500 mm/s. Même si le robot peut être programmé pour se déplacer plus vite, la vitesse sera limitée à 500 mm/s.
●Générer chaque programme sous un fichier séparé et obliger les programmes d’avoir 3000 lignes de code au maximum. Les programmes longs seront divisés en de plus petits programmes qui seront appelé séquentiellement.
La section précédente montre comment ouvrir un post processeur pour une modification :
1.Sélectionner Programme➔Ajouter/Modifier Post Processeur
2.Sélectionner KUKA_KRC4
3.Sélectionner OK. Le post processor s’ouvrira dans l’éditeur Python IDLE.
Les sections suivantes montrent comment effectuer les modifications que l’on souhaite réaliser dans l’éditeur.
Contraindre une vitesse maximale
Suivre ces étapes afin de fixer une limite de vitesse maximale de 500 mm/s :
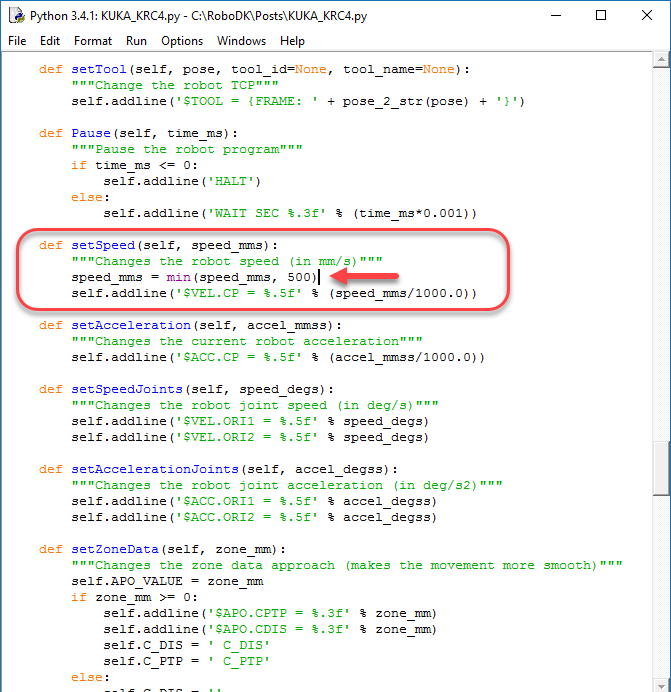
1.Trouver la définition de la fonction setSpeed (def setSpeed) – Ligne 288
2.Ajouter le code suivant avant de générer $VEL.CP qui convertira la vitesse en m/s :
speed_mms = min(speed_mms, 500)
Générer un programme par fichier
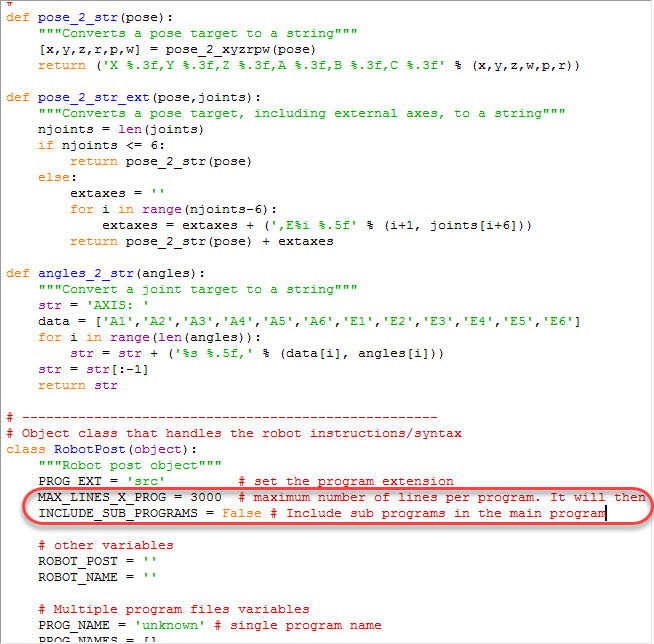
Ajouter les changements suivants pour générer plus d’un programme par fichier et générer des programmes avec 3000 lignes au maximum.
1.Fixer la variable MAX_LINES_X_PROG à 3000
2.Fixer la variable INCLUDE_SUB_PROGRAMS à False