Modifier un Post Processeur
Il est possible de modifier un post processeur existant ou de créer de nouveaux post processeurs. Tous les post processeurs doivent être placés dans le dossier d’installation (par défaut C:/RoboDK/Posts/) pour qu’ils puissent être sélectionnés dans RoboDK. La section précédente contient les consignes pour apprendre à assigner un post processeur pour un contrôleur robot spécifique.
Chaque post processeur est un fichier PY. Il est possible de le renommer ou de copier d’autres fichiers dans le dossier C:/RoboDK/Posts/ pour partager différents post processeurs. Afin de supprimer un post processeur, il faut simplement supprimer le fichier PY correspondant.
Les post processeurs peuvent être modifiés en utilisant un éditeur texte ou un éditeur Python (Python IDLE). En utilisant un éditeur Python, cela permet de faire une évaluation rapide d’un programme d’essais à la fin du fichier Python.
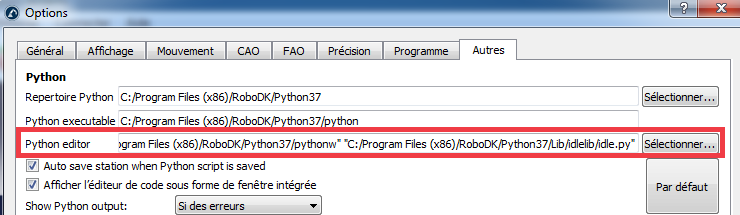
Python doit être installé pour tester ou utiliser les post processeurs (Python est installé par défaut avec RoboDK). Pour modifier un post processeur :
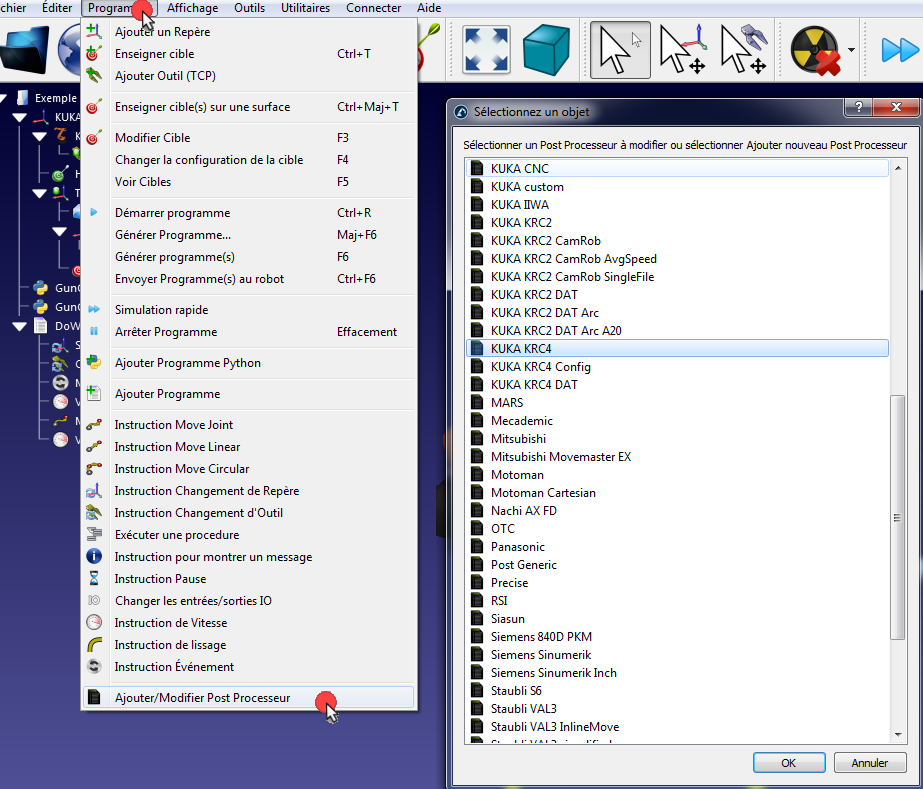
1.Sélectionner Programme➔Ajouter/Modifier Post Processeur.
2.Sélectionner un post processeur existant.
3.Sélectionner OK. Un éditeur texte s’ouvre.
4.Sélectionner Run➔Run module (F5) pour pré-visualiser un résultat. Modifier si nécessaire le post processeur.
Sinon, il est possible d’éditer un post processeur manuellement :
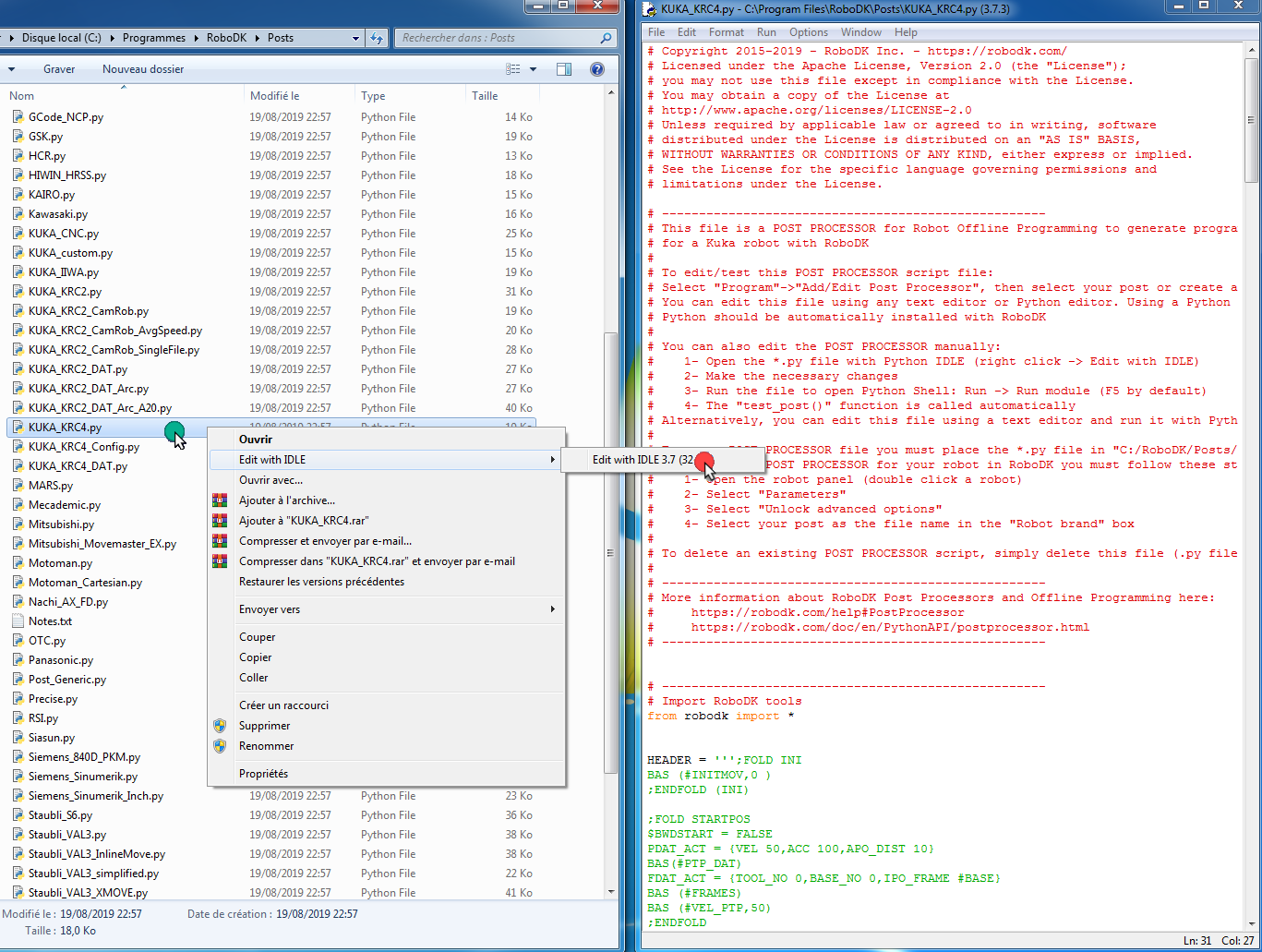
1.Aller dans le dossier C:/RoboDK/Posts/.
2.Ouvrir un fichier PY avec Python IDLE (faire un clic droit, puis, Edit with IDLE) ou un autre éditeur texte.
3.Effectuer les modifications.
4.Exécuter le fichier pour effectuer un essai : Sélectionner Run➔Run module (F5) dans Python IDLE.
Alternativement, il est possible d’éditer ce fichier en utilisant un éditeur texte et l’exécuter avec Python en double cliquant dessus.