Interface RoboDK RRS
RoboDK fournit une interface Python configurable à l'implémentation RRS-1 de n'importe quel fabricant de robots RCS. En outre, il fournit les utilitaires et les lignes de base nécessaires pour interagir entre RoboDK et l'interface RRS.
Bien que l'implémentation du RRS soit cohérente entre les différents fabricants de robots, la base fournie par l'interface peut nécessiter quelques ajustements pour une marque spécifique. RoboDK fournit une implémentation de l'interface RRS spécifique à chaque fournisseur.
RoboDK RRS pour Comau (Add-in)
Le RoboDK RRS pour Comau est un Add-in RoboDK spécifique pour les robots Comau. Pour installer un Add-in RoboDK, veuillez vous référer à la section Add-in de la documentation.
Une fois que vous avez acquis et activé les modules RCS requis auprès de Comau, vous pouvez commencer à utiliser l'Add-in RoboDK RRS pour Comau.
Pour créer un programme RSS, suivez les étapes suivantes :
1.Ouvrez les réglages avec le programme➔ RRS pour Comau➔ Réglages
a.Définissez l'ID du robot. Il s'agit normalement de 0.
b.Définissez le parcours du dossier du robot. Il s'agit généralement du dossier principal contenant les fichiers .c5g, .CIO et .xml.
c.Définissez le parcours du fichier du robot. Il s'agit du fichier .c5g contenu dans le dossier du robot.
d.Définissez le parcours du fichier DLL RRS, généralement rcscomau.dll.
2.Générez le programme RRS en cliquant avec le bouton droit de la souris sur votre programme➔ Generate RRS Program (Comau)
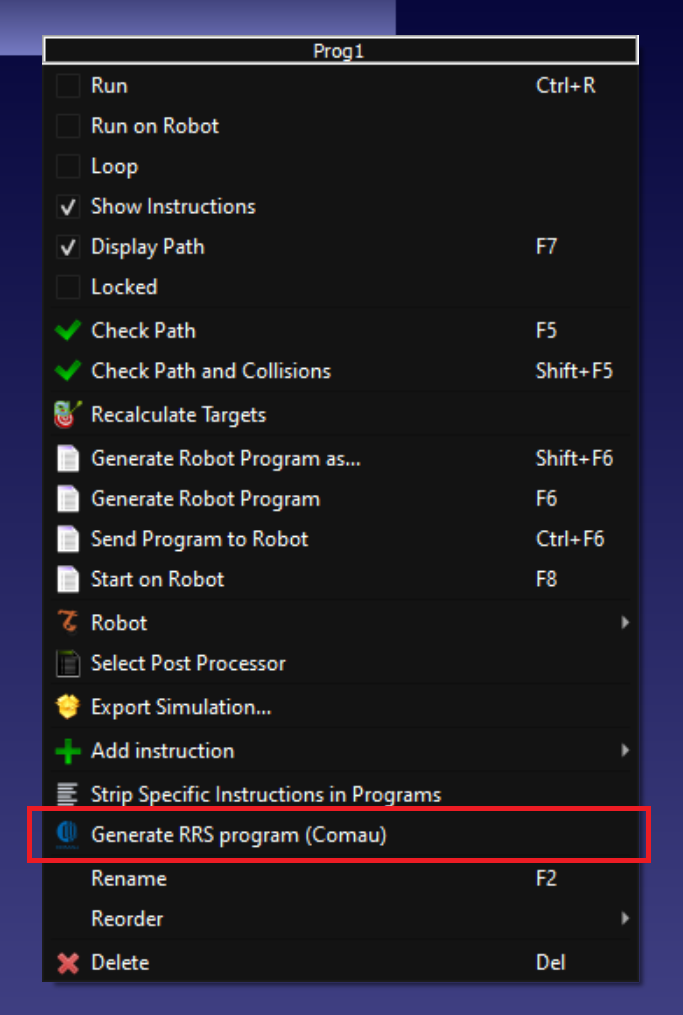
Un nouveau programme sera créé avec des joints précis et l'estimation du temps de cycle sera fournie dans le nom du programme.