C# Programmation En Ligne
Les programmes C# peuvent être exécutés directement sur le robot en utilisant le même code C# utilisé pour la simulation. La programmation en ligne permet d’exécuter un programme générique sur un contrôleur de robot spécifique en utilisant Robot Drivers. Suivre les étapes suivantes pour mettre à l’essai cette fonction à l’aide du projet exemple C# :
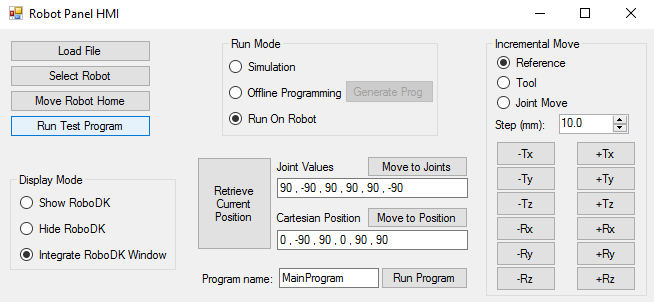
1.Sélectionner Run on Robot depuis la section Run Mode
2.Sélectionner n’importe quelles autres commande qui pourra faire bouger le robot
Les mouvements fonctionneront sur le vrai robot et le simulateur synchronisera les mouvements avec le robot.
Important : Une connexion entre le PC et le robot est requise en utilisant les pilotes de robot (clic droit sur un robot, puis sélectionner Connecter au robot…). Plus d’informations dans la section Robot Drivers.
Note : Le mode d’exécution (RunMode) de la connexion RDK/Robolink est changé à RUNMODE_RUN_ROBOT, cela permet d’exécuter les mouvements sur le robot. Exemple :
RDK = Robolink();
RDK.setRunMode(RUNMODE_RUN_ROBOT);
Astuce : La macro SampleOnlineProgramming.pyprovenant du dossier C:/RoboDK/Library/Macros/ fournit un exemple complet pour la programmation en dehors du GUI de RoboDK.
Note : Plus d’information à propos de l’utilisation des Drivers robot à travers l’API dans la section Robot Drivers.