Exemple Simulink
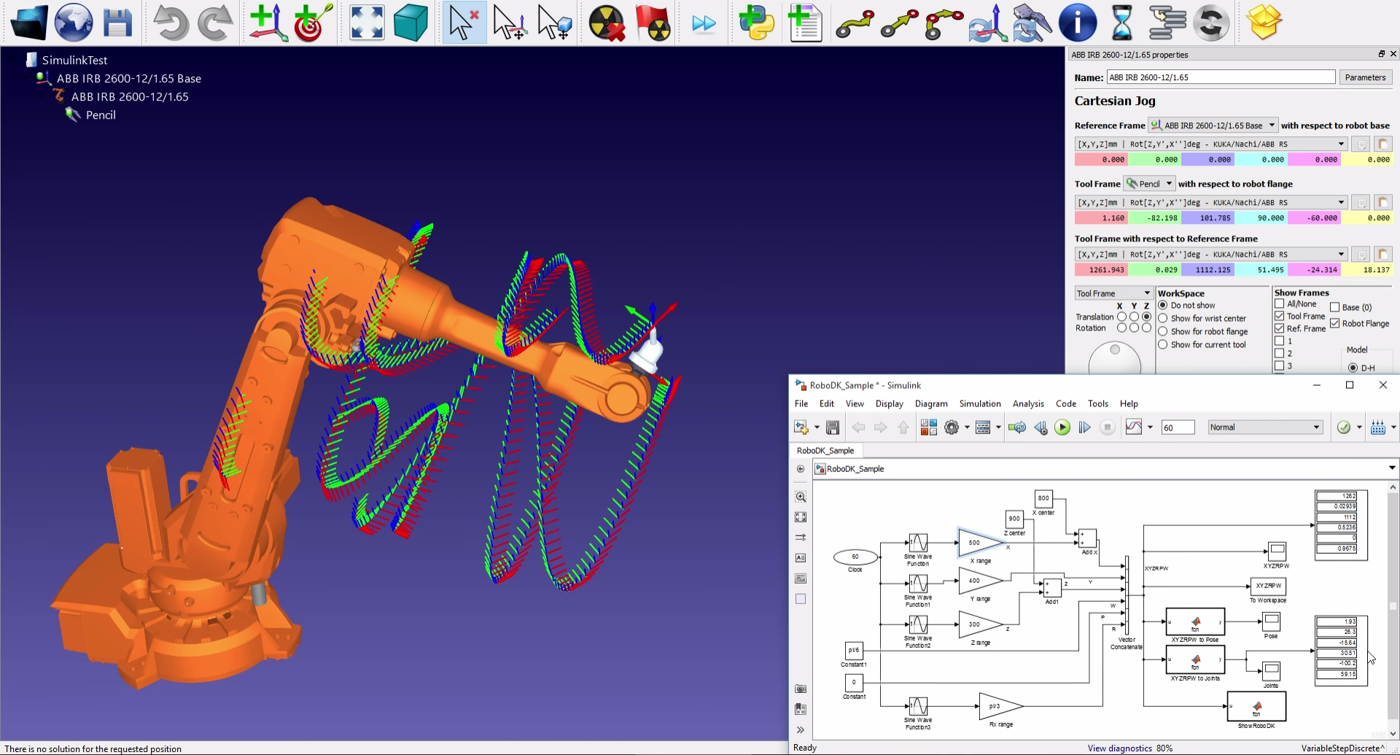
Un projet Simulink est disponible à titre d’exemple. Dans la simulation, le robot est déplacé le long d’un ensemble de coordonnées XYZ générées arbitrairement.
La vidéo suivante montre le résultat de l’exécution de la simulation :
https://www.youtube.com/watch?v=7DDBMwa0-Oc