Matlab API
L’API Robodk pour Matlab est disponible dans le dossier d’installation Robodk. Elle se trouve généralement dans C:/Robodk/Matlab/. L’API Robodk pour Matlab est fournie sous forme de fichiers m.
Matlab est un langage de programmation propriétaire développé par MathWorks. Entre autres, MATLAB permet des manipulations matricielles, le traçage de fonctions et de données et la mise en œuvre d’algorithmes.
La section principale de ce document explique les avantages de l’utilisation de l’API Robodk avec un langage de programmation largement utilisé comme Matlab pour la programmation robot
L’API Robodk pour Matlab comprend :
●Robolink.m est une classe qui interagit avec Robodk. Tout objet dans l’arborescence de la station Robodk peut être récupéré à l’aide de l’objet Robolink et il est représenté par l’objet Robolinkitem (comme la classe Robolink de Python).
●Robolinkitem.m est une classe qui représente un élément Robodk dans l’arborescence de la station. Il est possible d’effectuer différentes opérations sur cet élément (comme la classe Robolink.Item de Python).
●transl.m, rotx.m, roty.m et rotz.m sont des fonctions qui créées des posages matricielles donnant un XYZ en vecteur de translation ou rotation le long d’un axe spécifique.
●Pose_2_XYZRPW.m et XYZRPW_2_Pose.m permettent de convertir les position XYZ et RPW des angles d’Euler et vice versa. Plus d’information dans la section Repères de référence.
L’exemple de code est disponible à la page suivante : https://robodk.com/Matlab-API
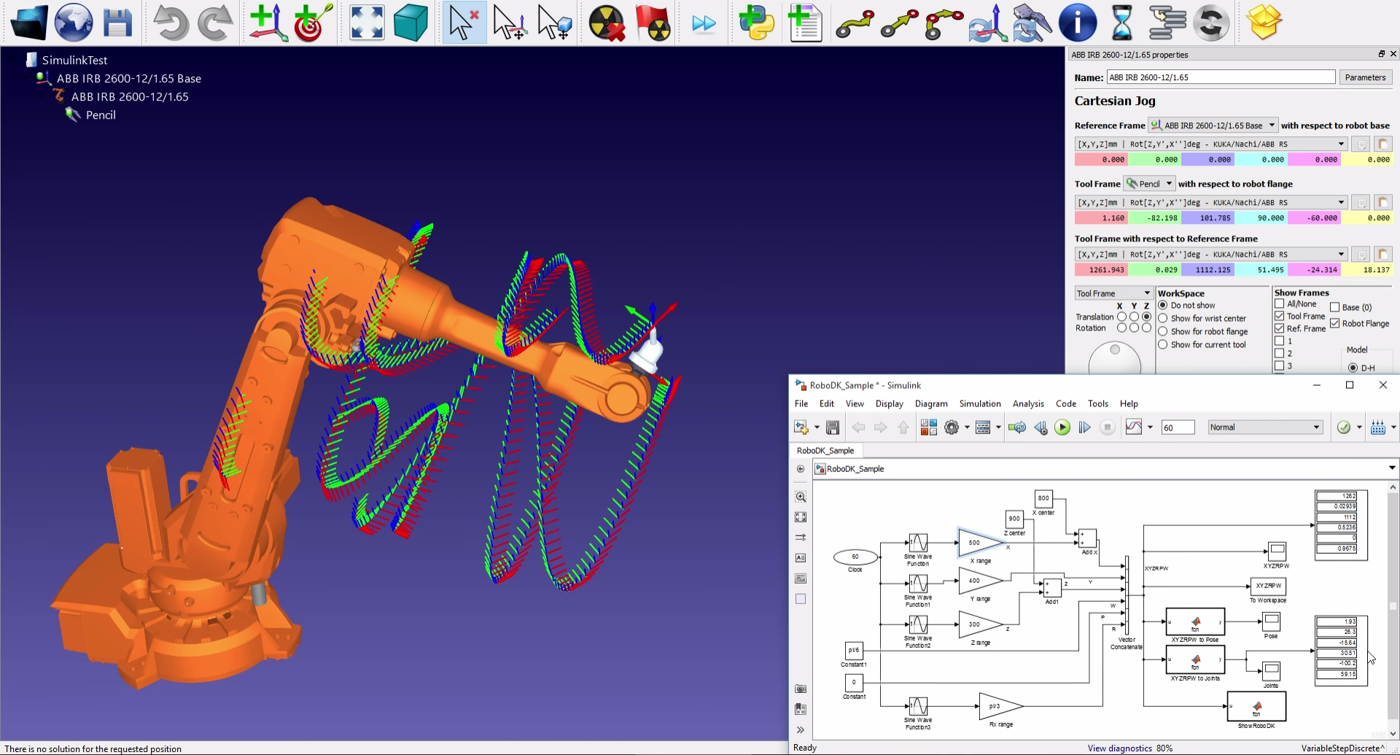
Exemple Simulink
Un projet Simulink est disponible à titre d’exemple. Dans la simulation, le robot est déplacé le long d’un ensemble de coordonnées XYZ générées arbitrairement.
La vidéo suivante montre le résultat de l’exécution de la simulation :
https://www.youtube.com/watch?v=7DDBMwa0-Oc