Programmation En Ligne Python
Les programmes Python peuvent être exécutés directement sur le robot en utilisant le même code Python utilisé pour la simulation robot (comme indiqué dans la section Simulation Python). La programmation en ligne permet d’exécuter un programme générique sur un contrôleur de robot spécifique en utilisant un Pilote/Drivers Robot :
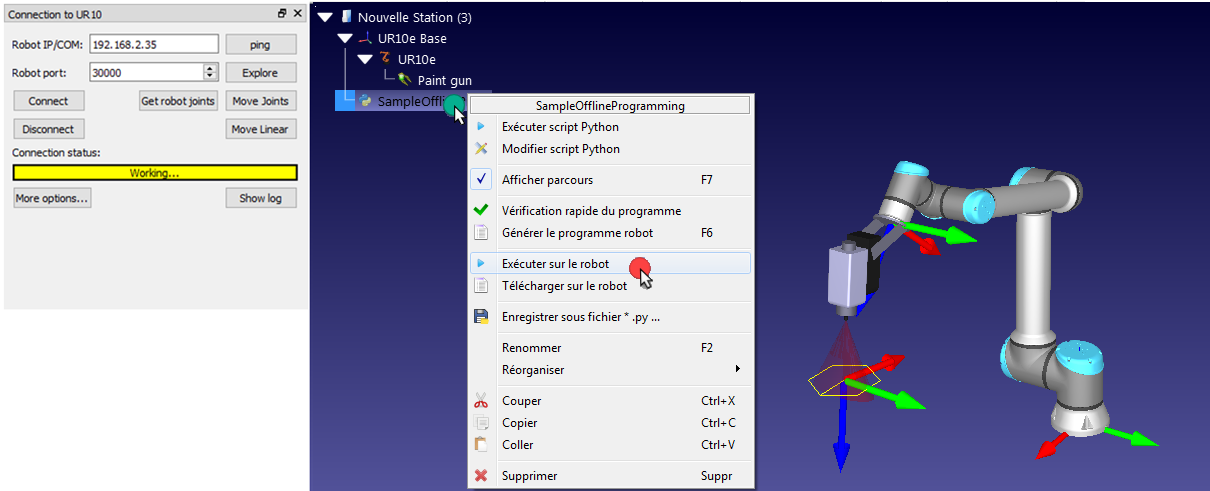
1.Faire un clic droit sur 
2.Sélectionner Run on robot
Le programme s’exécutera sur le robot pendant que le programme Python est en train de s’exécuté.
Important : Une connexion entre le PC et le robot est requise en utilisant Robot Drivers (clic droit sur un robot, puis sélectionner Connect to robot…). Plus d’informations dans la section Pilotes robot.
Note : L’option Exécuter sur le Robot change automatiquement le mode d’exécution de la connexion RDK/Robolink sur RUNMODE_RUN_ROBOT. En d’autres termes, il est possible d’exécuter les commandes de mouvement du robot en dehors de l’interface graphique de Robodk (GUI). Par exemple :
RDK = Robolink()
RDK.setRunMode(RUNMODE_RUN_ROBOT)
Astuce : La macro SampleOnlineProgramming.pyprovenant du dossier C:/RoboDK/Library/Macros/ fournit un exemple complet pour le tester avec le même hexagone que celui de la section Simulation Python.
Note : Plus d’information à propos de l’utilisation des Pilotes/Drivers robot à travers l’API dans la section Robot Drivers.