Python API
Pythonest un langage de programmation de haut niveau largement utilisé pour la programmation. Python est un langage de programmation qui vous permet de travailler plus rapidement et d’intégrer plus efficacement vos systèmes. La syntaxe de Python permet aux programmeurs d’exprimer des concepts en moins de lignes de code par rapport à d’autres langages, ce qui le rend convivial et facile à apprendre.
La section précédenteexplique les avantages de l’utilisation de l’API RoboDK avec un langage de programmation largement utilisé pour la programmation de robots tels que Python.
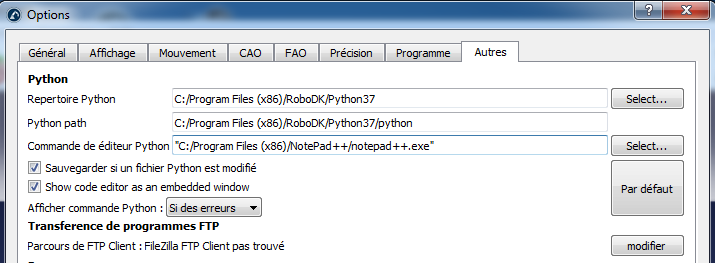
Python est installé automatiquement et intégré avec RoboDK par défaut. Sélectionner Outils➔Options➔Autrespour changer les paramètres par défauts. (Localisation de Python et Python Editor).
L’API Robodk pour Python est divisée en deux modules :
●Le module robolink (robolink.py) : Le module robolink est l’interface entre Robodk et Python. Tout objet de l’arborescence de la station Robodk peut être récupéré à l’aide d’un objet Robolink et est représenté par l’objet Item. Il est possible d’effectuer des opérations différentes sur cet élément selon la classe de Robolink.Item
●Le module robodk (robodk.py) : Le module robodk est une boîte à outils robotique pour Python qui permet d’effectuer des transformations de pose et d’obtenir des angles d’Euler pour différentes marques de robots. Tous les post-processeurs dépendent de ce module robodk.
Les modules Python sont situés dans le dossier C:/Robodk/Python/ et ils sont copiés automatiquement dans le chemin du dossier Python lorsque Robodk est installé ou lorsque les paramètres Python par défaut sont sélectionnés (voir l’image précédente).
Les sous-sections suivantes montrent comment créer un programme simple pour la simulation, la programmation hors ligne et la programmation en ligne. D’autres exemples sont disponibles sur la page de l’API Python pour Robodk. De plus, la bibliothèque Robodk contient des exemples de macros Python dans le dossier C:/Robodk/Library/Macros/.
Simulation Python
Suivre ces étapes pour démarrer un projet exemple en utilisant un robot UR et simuler un mouvement avec le robot.
1.Sélectionner Fichier➔
2.Ouvrir le robot UR10
3.Sélectionner Fichier➔
4.Ouvrir Paint_gun.tool
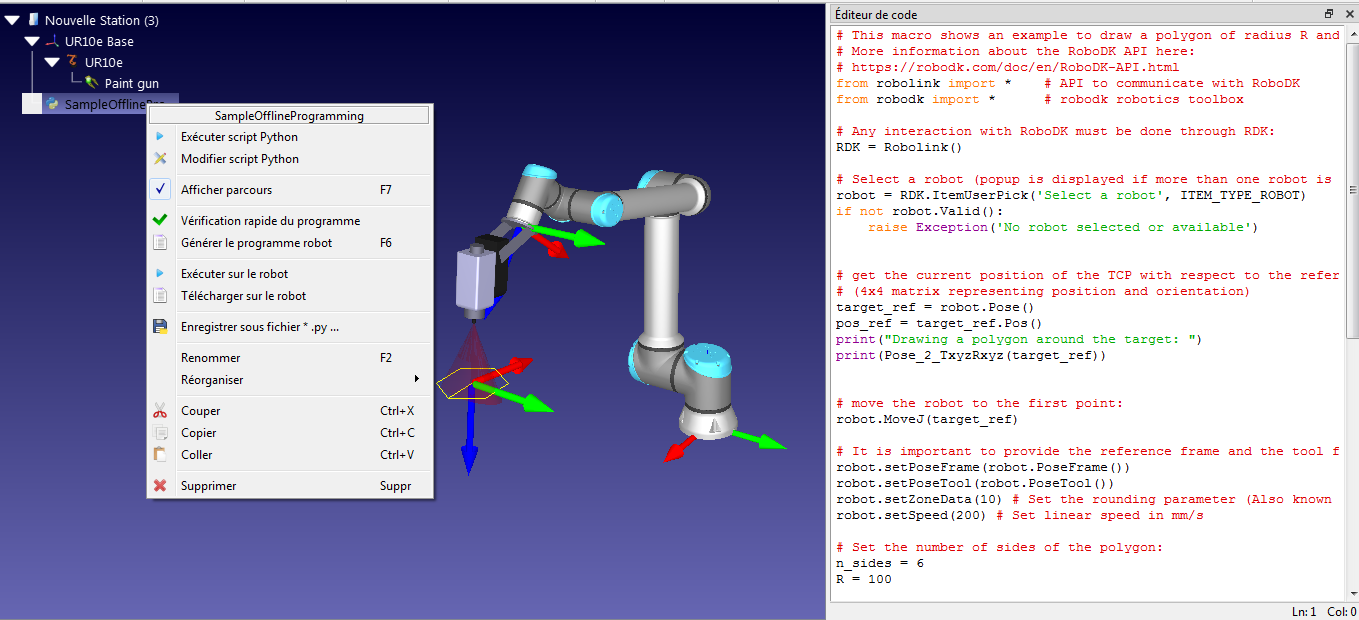
5.Ouvrir l’exemple de programme Python SampleOfflineProgramming.pydepuis C:/RoboDK/Library/Macros/

6.Double cliquer sur 

7.Faire un clic droit sur
La macro Sampleofflineprogramming dessinera un polygone de côté n_sides et de rayon R à l’emplacement actuel du robot, par rapport au repère du robot. Si vous le souhaitez, déplacer le robot vers un emplacement différent en changeant les dimensions du polygone et relancer le programme.
Cet exemple est similaire au programme montré dans la section de Programmation hors-lignesur le site internet (avec vidéo).
Python OLP
Les programmes Python peuvent être générés hors ligne en utilisant le même code Python utilisé pour simuler le robot (comme indiqué dans la section précédente de Python Simulation). La programmation hors ligne permet de générer des programmes de robot qui peuvent être exécutés sur un contrôleur de robot spécifique :
1.Faire un clic droit sur un programme
2.Sélectionner Générer programme robot (F6)
Dans ce cas, le programme n’est pas simulé mais exécuté rapidement pour obtenir le résultat : un programme robot spécifique à un contrôleur robot.
hars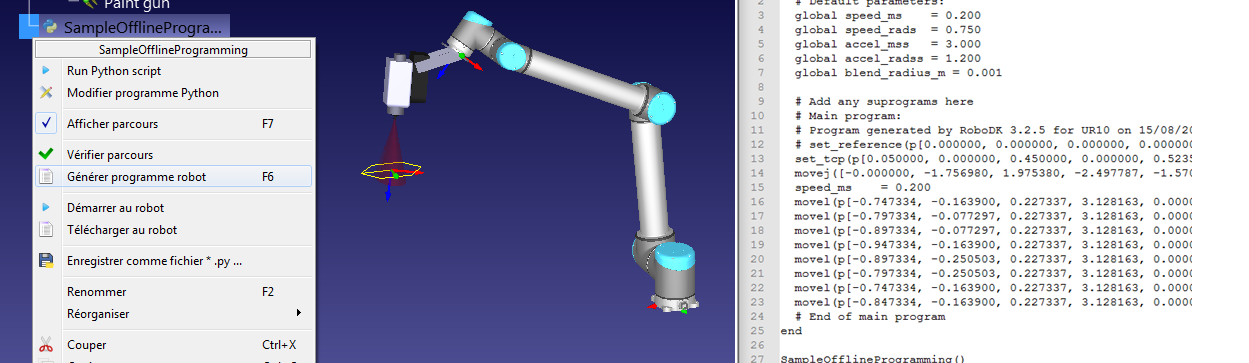
RDK = Robolink()
RDK.setRunMode(RUNMODE_MAKE_ROBOTPROG)
Programmation En Ligne Python
Les programmes Python peuvent être exécutés directement sur le robot en utilisant le même code Python utilisé pour la simulation robot (comme indiqué dans la section Simulation Python). La programmation en ligne permet d’exécuter un programme générique sur un contrôleur de robot spécifique en utilisant un Pilote/Drivers Robot :
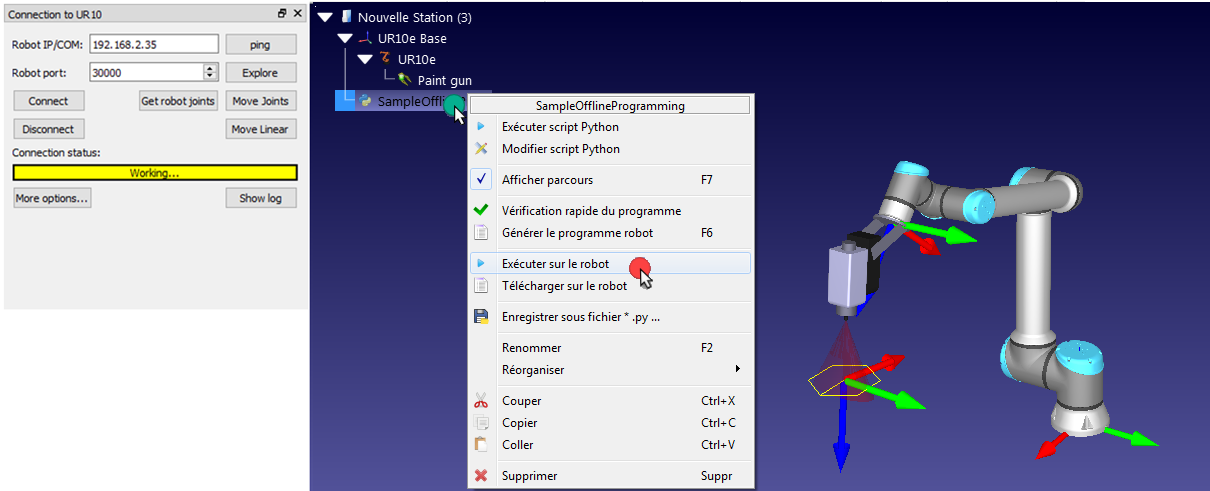
1.Faire un clic droit sur
2.Sélectionner Run on robot
Le programme s’exécutera sur le robot pendant que le programme Python est en train de s’exécuté.
RDK = Robolink()
RDK.setRunMode(RUNMODE_RUN_ROBOT)