Python OLP
Les programmes Python peuvent être générés hors ligne en utilisant le même code Python utilisé pour simuler le robot (comme indiqué dans la section précédente de Python Simulation). La programmation hors ligne permet de générer des programmes de robot qui peuvent être exécutés sur un contrôleur de robot spécifique :
1.Faire un clic droit sur un programme 
2.Sélectionner Générer programme robot (F6)
Dans ce cas, le programme n’est pas simulé mais exécuté rapidement pour obtenir le résultat : un programme robot spécifique à un contrôleur robot.
Astuce : Faire un clic droit sur un robot et sélectionner Sélectionner le Post Processeur pour spécifier un post-processeur différent pour la programmation hors ligne (comme indiqué dans la section Post Processor).
hars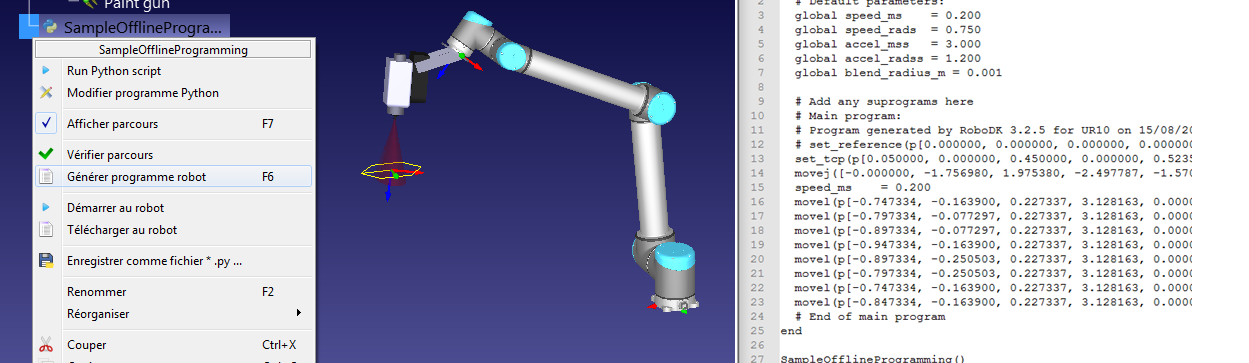
Note : L’option de Générer programme robot définit automatiquement le mode d’exécution de la connexion RDK/Robolink à RUNMODE_MAKE_ROBOTPROG. En d’autres termes, il est possible de générer le programme spécifique à marque du Robot au lieu de le simuler, si le programme Python est exécuté en dehors de l’interface graphique de Robodk. Par exemple :
RDK = Robolink()
RDK.setRunMode(RUNMODE_MAKE_ROBOTPROG)