Simulation Python
Suivre ces étapes pour démarrer un projet exemple en utilisant un robot UR et simuler un mouvement avec le robot.
1.Sélectionner Fichier➔
2.Ouvrir le robot UR10
3.Sélectionner Fichier➔
4.Ouvrir Paint_gun.tool
5.Ouvrir l’exemple de programme Python SampleOfflineProgramming.pydepuis C:/RoboDK/Library/Macros/

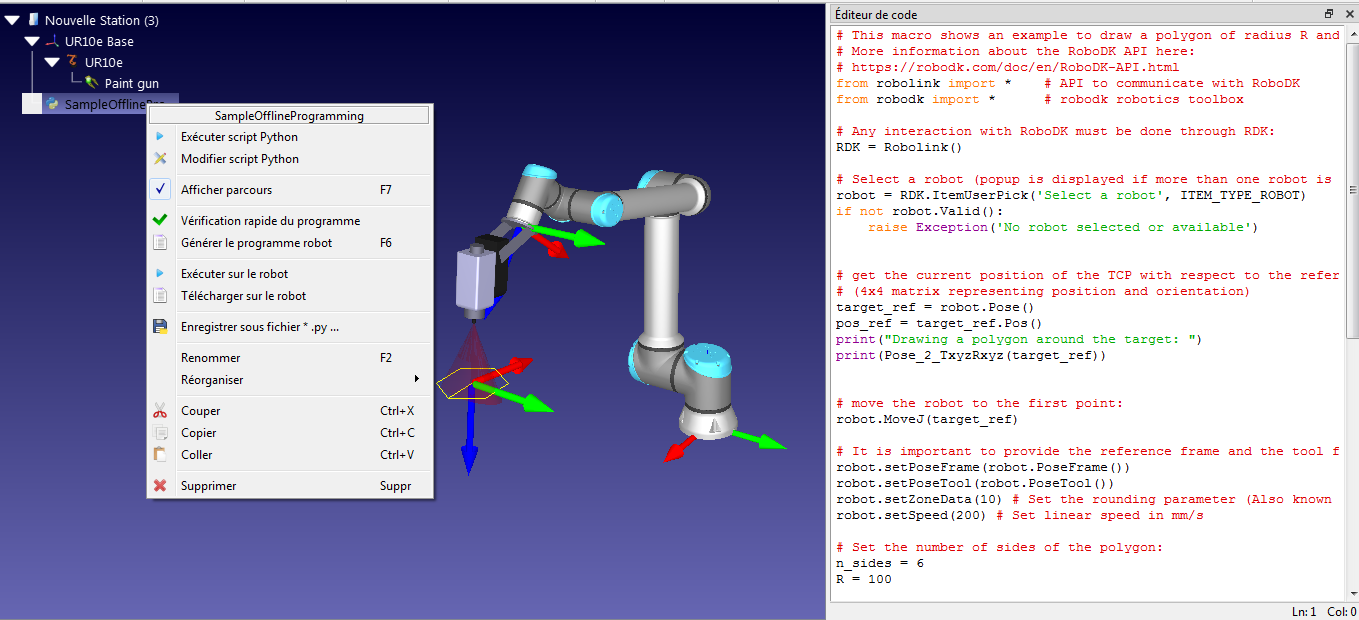
6.Double cliquer sur 

7.Faire un clic droit sur
La macro Sampleofflineprogramming dessinera un polygone de côté n_sides et de rayon R à l’emplacement actuel du robot, par rapport au repère du robot. Si vous le souhaitez, déplacer le robot vers un emplacement différent en changeant les dimensions du polygone et relancer le programme.
Cet exemple est similaire au programme montré dans la section de Programmation hors-lignesur le site internet (avec vidéo).