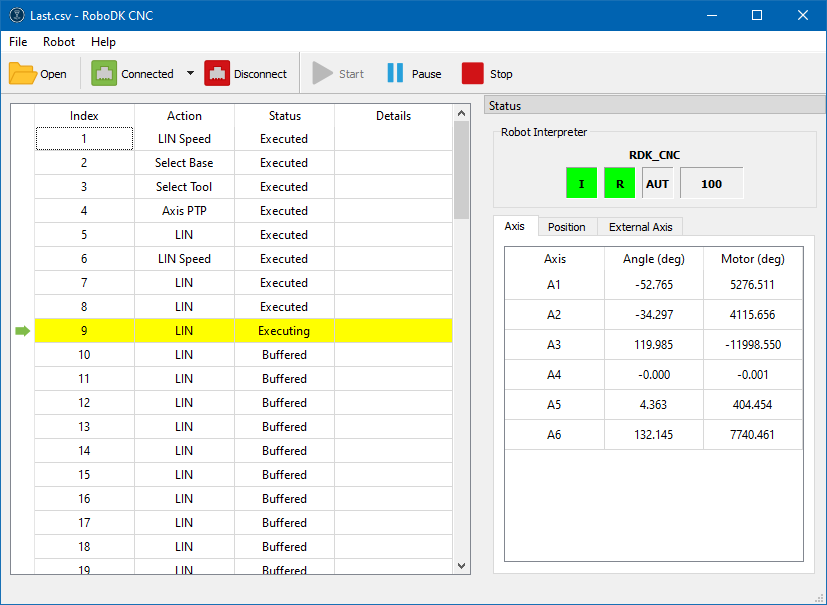
Interface utilisateur de la CNC RoboDK
Le RoboDK CNC permet de transmettre de grands programmes à un contrôleur de robot.
La fenêtre principale de RoboDK CNC contient les éléments suivants :
1.Menu principal
2.Barre d'outils
3.Tableau d'instructions
4.Panneau d'état
Les opérations du menu principal et de la barre d'outils se chevauchent.
| Ouvrir | Ouvrez un fichier CSV généré à l'aide du e RoboDK CNC post processeur . |
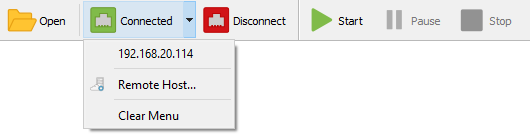
| Connecter | Cette icône indique qu'il n'y a actuellement aucune connexion au système de commande du robot. Appuyez sur ce bouton pour ouvrir le menu de l'historique des connexions. |
| Hôte à distance... | Cette action fait apparaître la boîte de dialogue Nouvelle connexion pour se connecter à l'adresse IP et au port du système de commande du robot distant. |
| Connexion | Cette icône indique une tentative de connexion au système de commande du robot. |
| Connecté | Cette icône indique que la connexion au système de commande du robot est réussie. |
| Déconnexion | Cette action interrompt immédiatement la connexion au système de commande du robot. Attention, le robot peut continuer à se déplacer même après la déconnexion de la CNC RoboDK. |
| Démarrer | Commencez à exécuter les mouvements du robot dès la première instruction. Ou poursuivez l'exécution d'un programme déjà lancé. |
| Pause | Suspendre l'exécution d'un programme déjà lancé. |
| Arrêter | Annule l'exécution du programme et arrête les mouvements du robot. |









Le panneau d'état contient des informations sur le programme KRL en cours d'exécution, des indicateurs de préparation et de dépassement de vitesse, ainsi que des informations sur la position actuelle du robot.
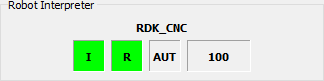
Le panneau Robot Interpreter contient quatre indicateurs :
Entraînements et mouvements des robots |
| Les entraînements du robot sont activés et le robot est prêt à effectuer des mouvements. |
| Les actionneurs du robot sont désactivés et le robot n'est pas prêt à fonctionner. | |
Statut du programme KRL |
| Le programme du robot n'est pas chargé. |
| Le programme du robot est chargé et prêt à être exécuté. | |
| Le programme du robot est en cours d'exécution. | |
| Le programme du robot a été interrompu en raison d'une erreur. | |
| Le programme du robot a été entièrement exécuté. | |
Mode contrôleur de robot |
| Mode de fonctionnement actuel du système de commande du robot. Il peut prendre les valeurs suivantes : T1, T2, AUT, EXT. |
Surpassement de la vitesse |
| La valeur de la vitesse d'exécution du programme en pourcentage de 0 à 100. |








