RoboDK CNC
RoboDK CNC est une collection d'outils qui facilitent l'utilisation de robots comme une CNC. RoboDK CNC permet l'exécution de grands programmes jusqu'à un nombre illimité de lignes en mode streaming. Les grands programmes sont généralement le résultat de l'utilisation de systèmes CAO/FAO et de l'utilisation de robots pour l'usinage.
La plupart des systèmes de commande de robots ont des ressources très limitées et sont incapables de charger de grands programmes en mémoire. RoboDK CNC élimine ces limitations en envoyant ces coordonnées une par une ou par groupes de sous-programmes au système de commande (également connu sous le nom de dripfeeding).
RoboDK offre un Add-in dédié (RoboDK CNC) qui permet d'exécuter de grands projets d'usinage de robots sur les contrôleurs de robots KUKA. RoboDK propose également des post-processeurs dédiés pour certains contrôleurs afin de mettre en œuvre cette stratégie.
Installez l'add-in CNC de RoboDK
Si vous avez déjà installé RoboDK avec le plugin Add-In Manager, la seule action que vous devez faire est d'installer le complément à partir de la bibliothèque en ligne de RoboDK.
Le serveur d'interface C3 Bridge doit être installé dans le système de commande du robot. Pour plus d'informations, voir le pilote RoboDK pour KUKA.
Interface utilisateur de la CNC RoboDK
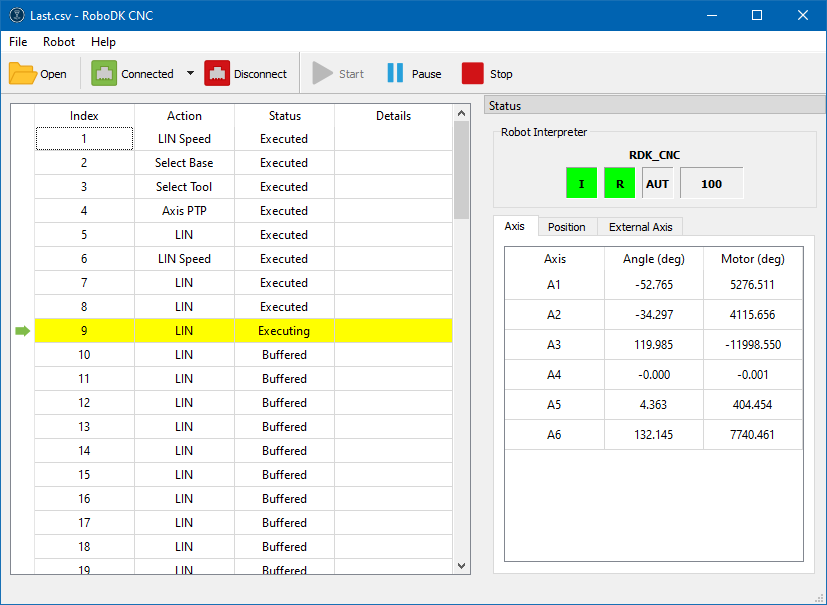
Le RoboDK CNC permet de transmettre de grands programmes à un contrôleur de robot.
La fenêtre principale de RoboDK CNC contient les éléments suivants :
1.Menu principal
2.Barre d'outils
3.Tableau d'instructions
4.Panneau d'état
Les opérations du menu principal et de la barre d'outils se chevauchent.
| Ouvrir | Ouvrez un fichier CSV généré à l'aide du e RoboDK CNC post processeur . |
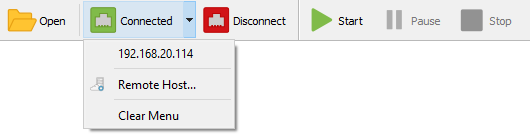
| Connecter | Cette icône indique qu'il n'y a actuellement aucune connexion au système de commande du robot. Appuyez sur ce bouton pour ouvrir le menu de l'historique des connexions. |
| Hôte à distance... | Cette action fait apparaître la boîte de dialogue Nouvelle connexion pour se connecter à l'adresse IP et au port du système de commande du robot distant. |
| Connexion | Cette icône indique une tentative de connexion au système de commande du robot. |
| Connecté | Cette icône indique que la connexion au système de commande du robot est réussie. |
| Déconnexion | Cette action interrompt immédiatement la connexion au système de commande du robot. Attention, le robot peut continuer à se déplacer même après la déconnexion de la CNC RoboDK. |
| Démarrer | Commencez à exécuter les mouvements du robot dès la première instruction. Ou poursuivez l'exécution d'un programme déjà lancé. |
| Pause | Suspendre l'exécution d'un programme déjà lancé. |
| Arrêter | Annule l'exécution du programme et arrête les mouvements du robot. |









Le panneau d'état contient des informations sur le programme KRL en cours d'exécution, des indicateurs de préparation et de dépassement de vitesse, ainsi que des informations sur la position actuelle du robot.
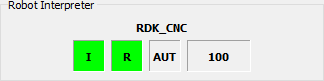
Le panneau Robot Interpreter contient quatre indicateurs :
Entraînements et mouvements des robots |
| Les entraînements du robot sont activés et le robot est prêt à effectuer des mouvements. |
| Les actionneurs du robot sont désactivés et le robot n'est pas prêt à fonctionner. | |
Statut du programme KRL |
| Le programme du robot n'est pas chargé. |
| Le programme du robot est chargé et prêt à être exécuté. | |
| Le programme du robot est en cours d'exécution. | |
| Le programme du robot a été interrompu en raison d'une erreur. | |
| Le programme du robot a été entièrement exécuté. | |
Mode contrôleur de robot |
| Mode de fonctionnement actuel du système de commande du robot. Il peut prendre les valeurs suivantes : T1, T2, AUT, EXT. |
Surpassement de la vitesse |
| La valeur de la vitesse d'exécution du programme en pourcentage de 0 à 100. |









Exemple de flux de travail
Cette section décrit les étapes à suivre pour utiliser la CNC RoboDK afin d'exécuter un programme sur un contrôleur KUKA.
1.Lancez l'application RoboDK CNC : avec le plugin activé, sélectionnez Utilities➔ RoboDK CNC.
2.Connectez-vous au système de contrôle du robot distant avec le serveur d'interface C3 Bridge en cours d'exécution.
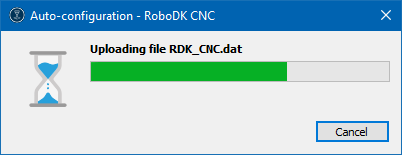
3.Si vous exécutez l'application pour la première fois ou si votre système de commande de robot n'a jamais utilisé RoboDK CNC, une configuration automatique est nécessaire avant le démarrage. Exécutez-la à l'aide du menu Robot➔ Configure...
4.Ouvrez un fichier de programme CSV généré à l'aide du post-processeur CNC RoboDK.
5.Assurez-vous que le robot est prêt à fonctionner : les entraînements sont allumés, le mode de fonctionnement et les réglages de vitesse souhaités sont définis.
6.Appuyez sur le bouton Start pour lancer l'exécution du programme.