Assistant de calibrage
Pour lancer la procédure d'étalonnage, il suffit de sélectionner TwinTool➔
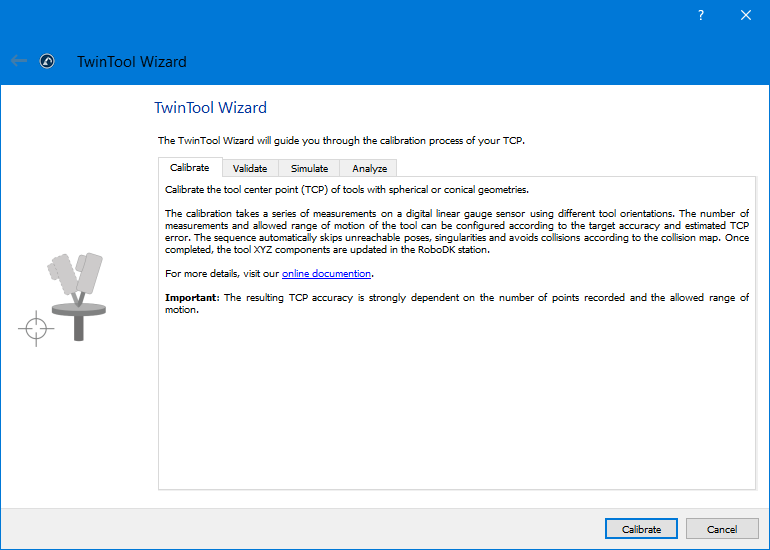
Après avoir lancé l'assistant, vous serez guidé dans les configurations


Important : il est recommandé d'exécuter la séquence d'étalonnage en mode simulation au moins une fois avant d'effectuer l'étalonnage sur le robot connecté.
Important : La séquence simulée peut ne pas correspondre à la séquence réelle utilisée pour l'étalonnage ou la validation. Le parcours du robot est ajusté automatiquement.
Astuce : Enregistrez la cible commune de la position du robot sur le capteur, en utilisant un nom différent de " Calib Target " (cible d'étalonnage). Vous pouvez la réutiliser pour remettre rapidement le robot en position.
CDO : Réglez l'erreur d'outil estimée à 5 mm ou moins si vous avez déjà une bonne estimation du CDO. La procédure d'étalonnage sera ainsi plus rapide.
Astuce : Modifiez l'amplitude des articulations en Z et XY pour modifier l'amplitude des mouvements du robot.