Pour calibrer l'outil (CDO) à l'aide de TwinTool, vous devez charger le robot dans RoboDK et vous assurer que le capteur et le robot sont connectés. Vous pouvez éventuellement modéliser la cellule en ajoutant les modèles 3D des objets et des outils. Cela permettra d'éviter automatiquement les collisions.
1.Chargez le robot :
a.Sélectionnez File (Fichier)➔ Open online library (Ouvrir la bibliothèque en ligne). La bibliothèque en ligne apparaît dans RoboDK.
b.Utilisez les filtres pour trouver votre robot.
c.Sélectionnez Ouvrir pour charger automatiquement le robot dans votre station RoboDK.
d.Vous pouvez également télécharger le fichier du robot directement à partir de la bibliothèque (https://robodk.com/library) et ouvrir le fichier avec RoboDK (le fichier .robot).
2.Connectez le capteur :
a.Connectez le capteur à votre ordinateur.
b.Sélectionnez TwinTool➔ Measure.
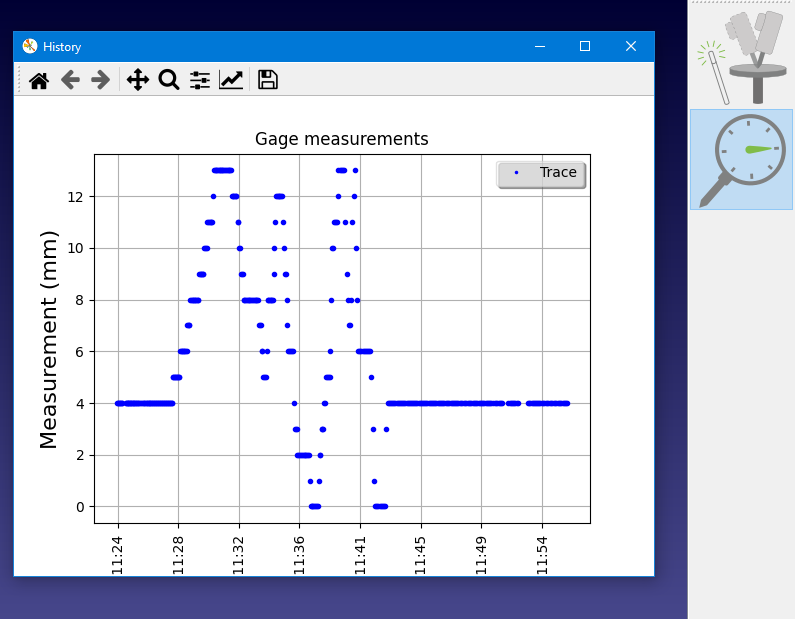
c.Assurez-vous que le capteur mesure et que les mesures sont stables.
Note : si vous ne pouvez pas vous connecter immédiatement au capteur, vous pourrez modifier les paramètres de connexion et les enregistrer pour une utilisation ultérieure au cours des étapes suivantes.
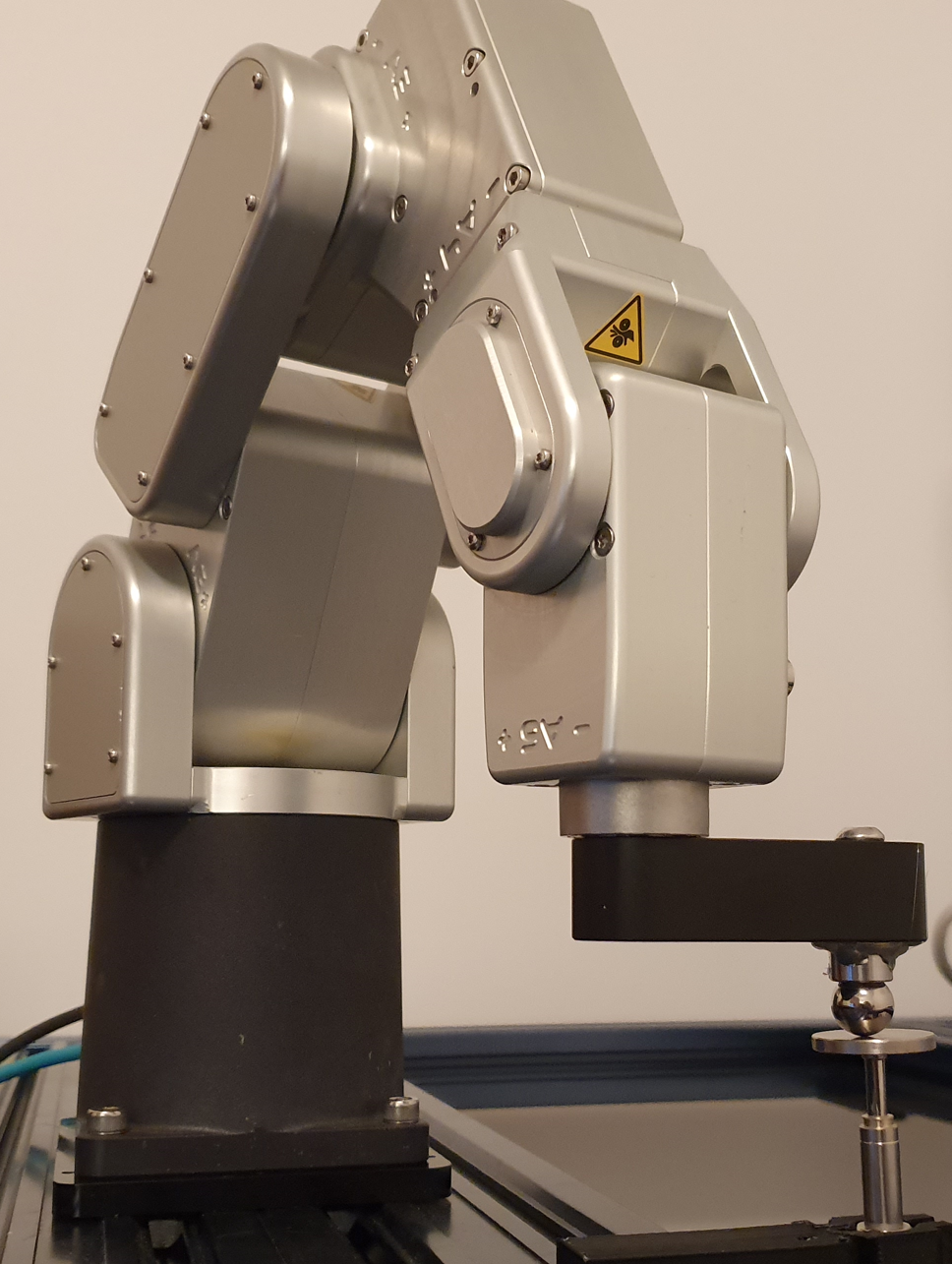
Important : assurez-vous que la configuration est suffisamment rigide pour l'étalonnage en veillant à ce que les vibrations à proximité n'altèrent pas les mesures. Par exemple, placez le robot sur le capteur et essayez de créer de petites vibrations (comme marcher près de la zone du capteur). La mesure doit rester stable à moins de 0,005 mm de bruit. Si ce n'est pas le cas, il est fortement recommandé de renforcer le support du capteur et/ou la base du robot.
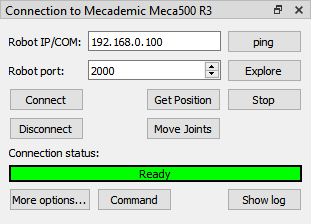
3.Connectez le robot :
a.Sélectionnez Connecter➔ Connecter le robot.
b.Saisissez l'IP et le port du robot.
c.Sélectionnez Connecter.
Note : Certains contrôleurs de robot nécessitent une configuration spécifique ou des options logicielles spécifiques. Pour plus d'informations, consultez la section sur les pilotes de robots.
4.Sélectionnez Obtenir la position dans le panneau de connexion du robot. Cette étape met à jour la position du robot dans RoboDK.
Installation personnalisée
Important : il est recommandé de modéliser en 3D la charge de votre cellule pour tout objet susceptible de provoquer des collisions avec le robot ou l'outil. Si vous avez un outil qui peut provoquer des collisions avec le robot (ou toute autre collision potentielle), il est préférable de procéder à une configuration personnalisée comme décrit dans la section suivante.
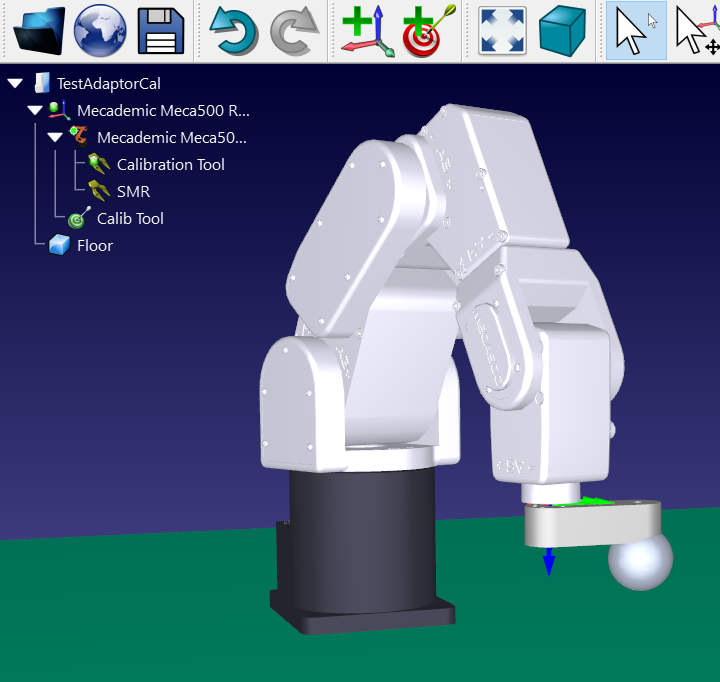
Vous pouvez éventuellement suivre ces étapes pour modéliser correctement l'environnement 3D de votre cellule.
1.Chargez le modèle 3D de votre outil et créez un outil dans RoboDK. Pour plus d'informations, consultez la section Créer un outil.
2.Chargez n'importe quel fichier 3D pour modéliser la cellule. Vous pouvez charger des fichiers 3D STEP, IGES, STL. Pour plus d'informations, reportez-vous à la section "Mise en route".
Note : Il est fortement recommandé de modéliser correctement la cellule pour éviter les collisions.
Astuce : si vous avez une bonne estimation du point central de l'outil, vous pouvez le configurer dans RoboDK et mettre à jour l'outil estimé pour avoir une procédure d'étalonnage plus rapide.
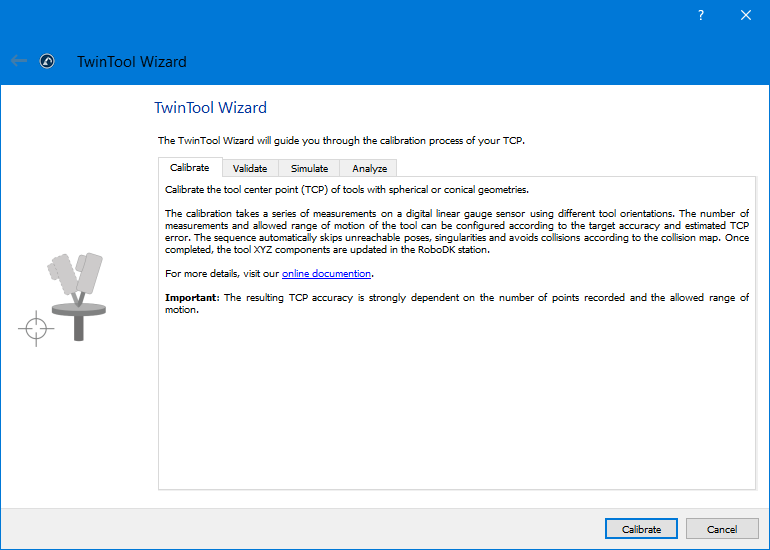
Assistant de calibrage
Pour lancer la procédure d'étalonnage, il suffit de sélectionner TwinTool➔ TwinTool Wizard.
Après avoir lancé l'assistant, vous serez guidé dans les configurations Calibration, Validation ou Simulation. Il s'agit notamment de configurer la connexion au capteur, d'assurer un état valide du robot et de passer en revue les paramètres clés. Suivez les étapes à l'écran et reportez-vous aux conseils de l'outil si vous avez besoin de détails supplémentaires.
Important : il est recommandé d'exécuter la séquence d'étalonnage en mode simulation au moins une fois avant d'effectuer l'étalonnage sur le robot connecté.
Important : La séquence simulée peut ne pas correspondre à la séquence réelle utilisée pour l'étalonnage ou la validation. Le parcours du robot est ajusté automatiquement.
Astuce : Enregistrez la cible commune de la position du robot sur le capteur, en utilisant un nom différent de " Calib Target " (cible d'étalonnage). Vous pouvez la réutiliser pour remettre rapidement le robot en position.
CDO : Réglez l'erreur d'outil estimée à 5 mm ou moins si vous avez déjà une bonne estimation du CDO. La procédure d'étalonnage sera ainsi plus rapide.
Astuce : Modifiez l'amplitude des articulations en Z et XY pour modifier l'amplitude des mouvements du robot.