Installation personnalisée
Important : il est recommandé de modéliser en 3D la charge de votre cellule pour tout objet susceptible de provoquer des collisions avec le robot ou l'outil. Si vous avez un outil qui peut provoquer des collisions avec le robot (ou toute autre collision potentielle), il est préférable de procéder à une configuration personnalisée comme décrit dans la section suivante.
Vous pouvez éventuellement suivre ces étapes pour modéliser correctement l'environnement 3D de votre cellule.
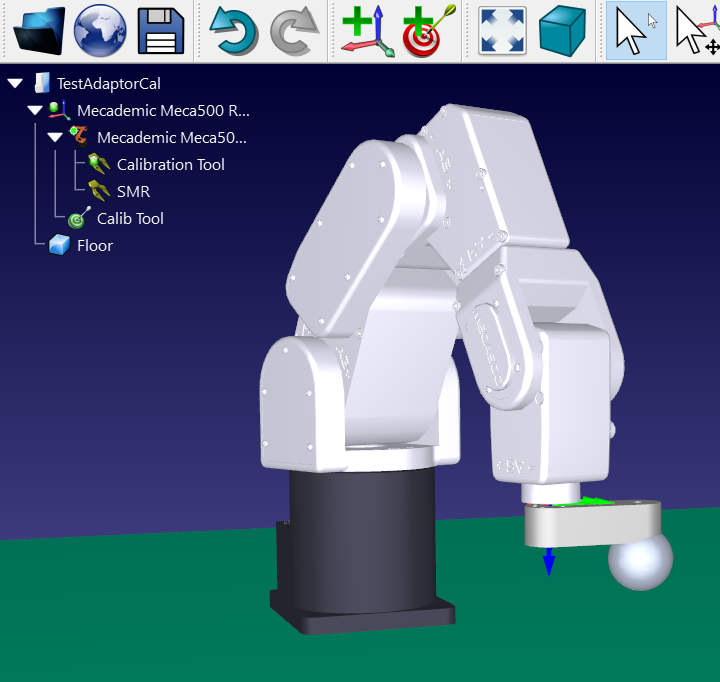
1.Chargez le modèle 3D de votre outil et créez un outil dans RoboDK. Pour plus d'informations, consultez la section Créer un outil.
2.Chargez n'importe quel fichier 3D pour modéliser la cellule. Vous pouvez charger des fichiers 3D STEP, IGES, STL. Pour plus d'informations, reportez-vous à la section "Mise en route".
Note : Il est fortement recommandé de modéliser correctement la cellule pour éviter les collisions.
Astuce : si vous avez une bonne estimation du point central de l'outil, vous pouvez le configurer dans RoboDK et mettre à jour l'outil estimé pour avoir une procédure d'étalonnage plus rapide.