RoboDK TwinTool
Introduction
Avec l'étalonnage de RoboDK TwinTool, vous pouvez étalonner automatiquement le point central de l'outil (CDO). Les robots industriels sont hautement reproductibles, mais pas précis. Par conséquent, la précision d'un robot industriel peut être améliorée grâce à l'étalonnage du robot et de l'outil. Sans étalonnage, la précision du robot dépend fortement de la marque et du modèle du robot.
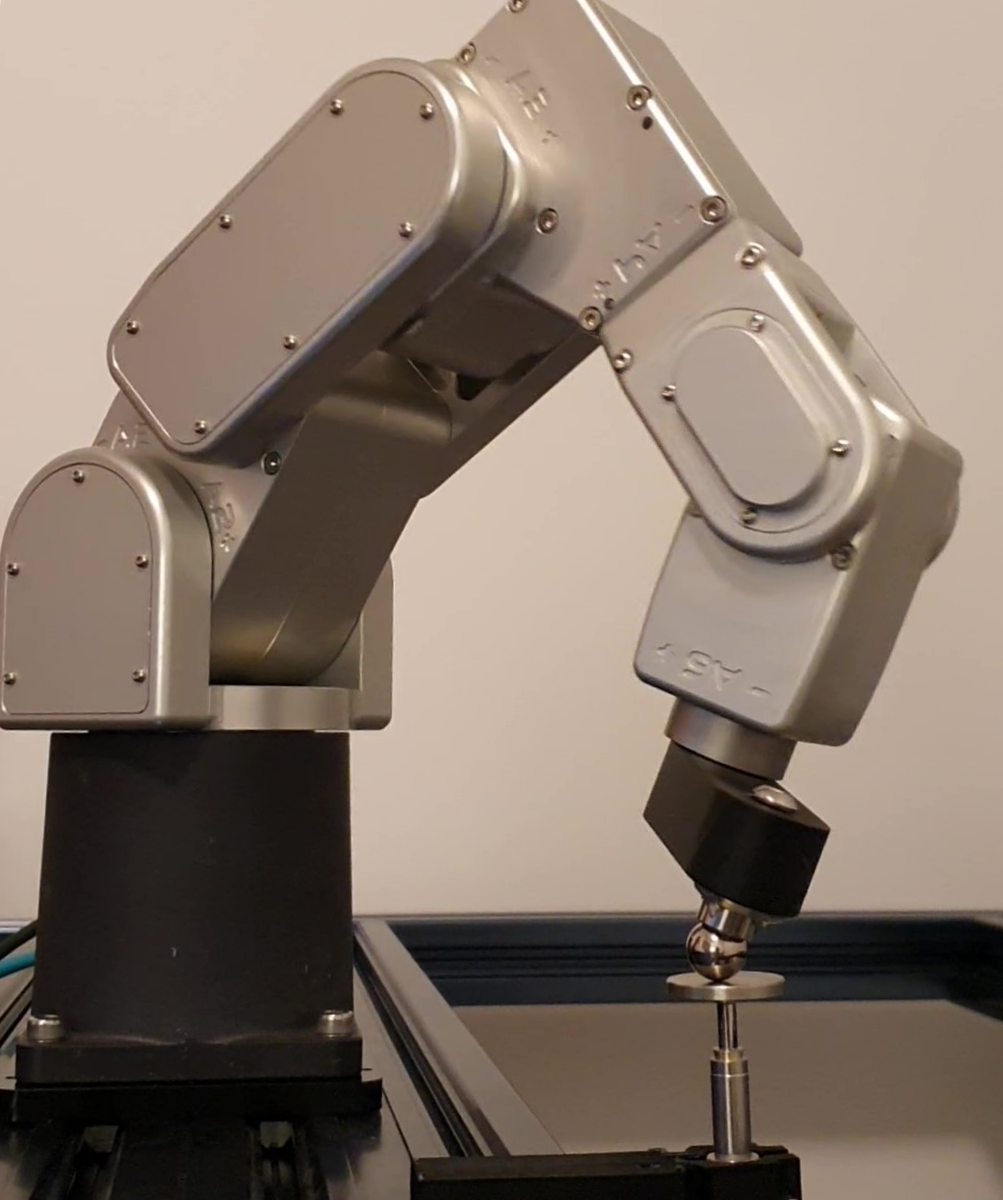

RoboDK TwinTool peut être utilisé pour calibrer et valider le point central de l'outil (CDO) . Le TwinTool peut calibrer avec précision le CDO pour les outils à géométrie sphérique ou conique.
1.Outils sphériques➔ Le centre de l'outil est calibré.
2.Outils coniques➔ La pointe de l'outil est calibrée
Exigences
Vous devez installer l'application RoboDK TwinTool et disposer d'un capteur compatible pour effectuer l'étalonnage automatisé de l'outil.
Veillez à disposer des éléments suivants :
1.Un ou plusieurs bras de robot.
2.Un comparateur compatible (également connu sous le nom de LVDT ou de jauge linéaire).
3.Le logiciel RoboDK doit être installé et une licence appropriée pour l'étalonnage automatisé des robots doit être disponible.
4.Vous avez besoin de pilotes de robot compatibles avec votre contrôleur de robot.
5.Installez l'application RoboDK TwinTool :
a.Téléchargez l'application TwinTool de RoboDK (contactez RoboDK pour obtenir un lien de téléchargement).
b.Double-cliquez sur le fichier pour installer l'application et l'ouvrir dans RoboDK.
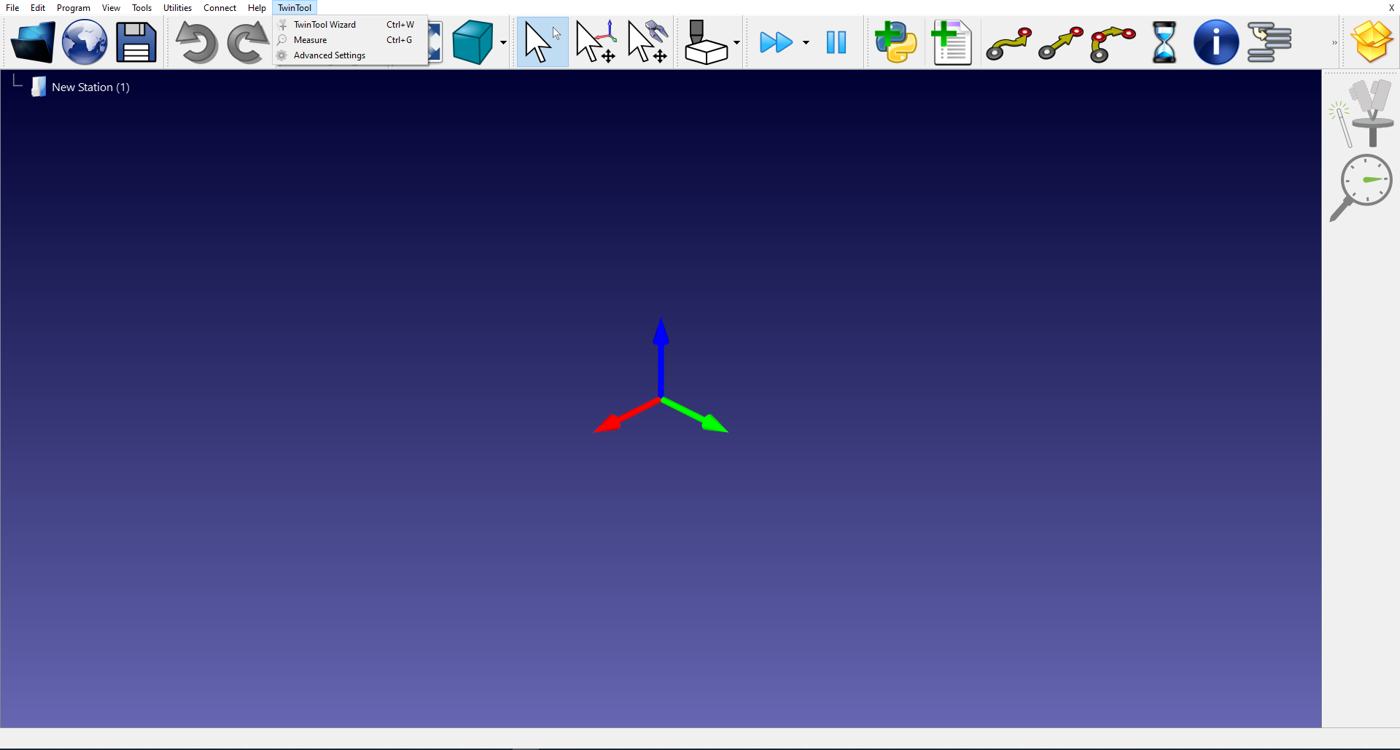
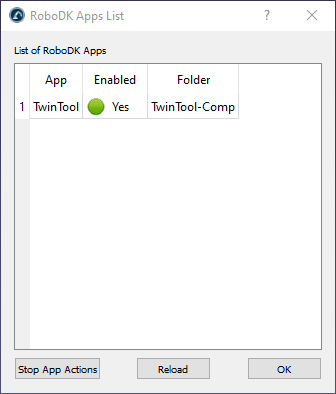
c.Sélectionnez Outils➔ Apps et double-cliquez sur TwinTool pour afficher la barre d'outils et le menu de TwinTool
Si vous ne parvenez pas à voir l'application TwinTool, vous devez fermer RoboDK et le redémarrer avec des privilèges d'administrateur pour installer correctement l'application.
Capteur à jauge linéaire
RoboDK TwinTool prend en charge plusieurs capteurs de mesure linéaire, notamment Keyence, Mitutoyo, Sylvac et d'autres. Les protocoles de communication comprennent l'USB, l'Ethernet/IP et le RS232. Le prix approximatif d'un capteur de mesure linéaire de qualité industrielle est de 1 500,00 euros.
Le capteur à jauge linéaire doit avoir une précision de 0,005 mm ou plus et une course de 10 mm ou plus. Il est recommandé d'avoir une fréquence de mesure de 50 échantillons par seconde ou plus. Ce capteur n'est pas fourni ou vendu par RoboDK. Nous vous recommandons de contacter votre distributeur local pour obtenir le capteur nécessaire à l'utilisation de RoboDK TwinTool.
La liste suivante présente un exemple de commande d'une jauge linéaire Keyence :
●Keyence GT2-P12 - Jauge de type crayon
●GT2-UB1 - Unité de connexion USB
●OP-87716 - Rallonge de câble
●OP-76875 - Support de montage suggéré pour la jauge
●Point de contact plat de 25 mm avec filetage M2,5x0,25 nécessaire (non fourni par Keyence)
La liste suivante présente un exemple de commande d'une jauge linéaire Mitutoyo :
●Mitutoyo 542-191 - LG 100 gage
●Mitutoyo 542-081A - Compteur EJ + AC
●Mitutoyo 21HZA149 - Interface USB (RS232 également pris en charge)
●Point de contact plat de 25 mm avec filetage M2,5x0,25 nécessaire (non fourni par Mitutoyo)
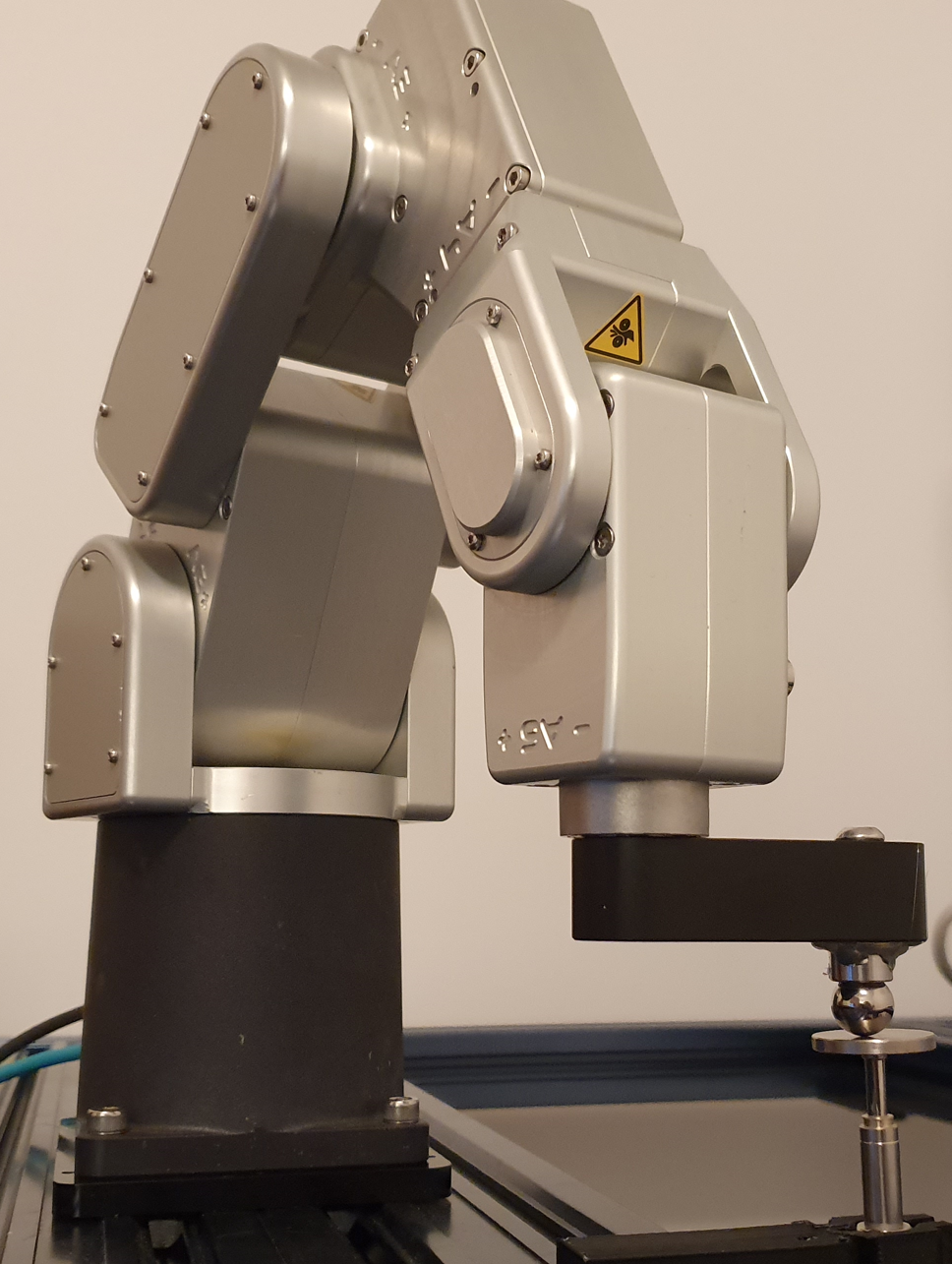
Configuration de l'étalonnage
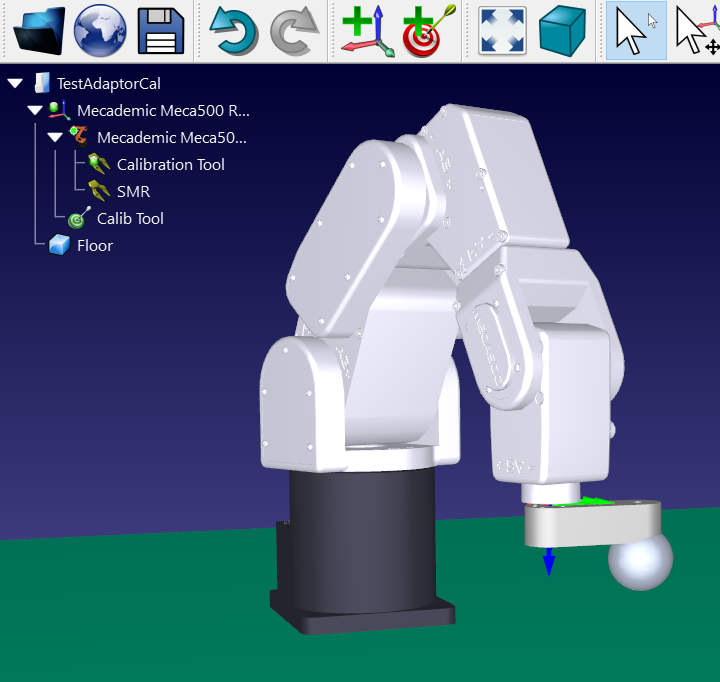
Pour calibrer l'outil (CDO) à l'aide de TwinTool, vous devez charger le robot dans RoboDK et vous assurer que le capteur et le robot sont connectés. Vous pouvez éventuellement modéliser la cellule en ajoutant les modèles 3D des objets et des outils. Cela permettra d'éviter automatiquement les collisions.
1.Chargez le robot :
a.Sélectionnez File (Fichier)➔ Open online library (Ouvrir la bibliothèque en ligne). La bibliothèque en ligne apparaît dans RoboDK.
b.Utilisez les filtres pour trouver votre robot.
c.Sélectionnez Ouvrir pour charger automatiquement le robot dans votre station RoboDK.
d.Vous pouvez également télécharger le fichier du robot directement à partir de la bibliothèque (https://robodk.com/library) et ouvrir le fichier avec RoboDK (le fichier .robot).
2.Connectez le capteur :
a.Connectez le capteur à votre ordinateur.
b.Sélectionnez TwinTool➔
c.Assurez-vous que le capteur mesure et que les mesures sont stables.
3.Connectez le robot :
a.Sélectionnez Connecter➔ Connecter le robot.
b.Saisissez l'IP et le port du robot.
c.Sélectionnez Connecter.
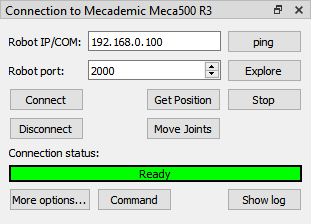
4.Sélectionnez Obtenir la position dans le panneau de connexion du robot. Cette étape met à jour la position du robot dans RoboDK.
Installation personnalisée
Vous pouvez éventuellement suivre ces étapes pour modéliser correctement l'environnement 3D de votre cellule.
1.Chargez le modèle 3D de votre outil et créez un outil dans RoboDK. Pour plus d'informations, consultez la section Créer un outil.
2.Chargez n'importe quel fichier 3D pour modéliser la cellule. Vous pouvez charger des fichiers 3D STEP, IGES, STL. Pour plus d'informations, reportez-vous à la section "Mise en route".
Assistant de calibrage
Pour lancer la procédure d'étalonnage, il suffit de sélectionner TwinTool➔
Après avoir lancé l'assistant, vous serez guidé dans les configurations


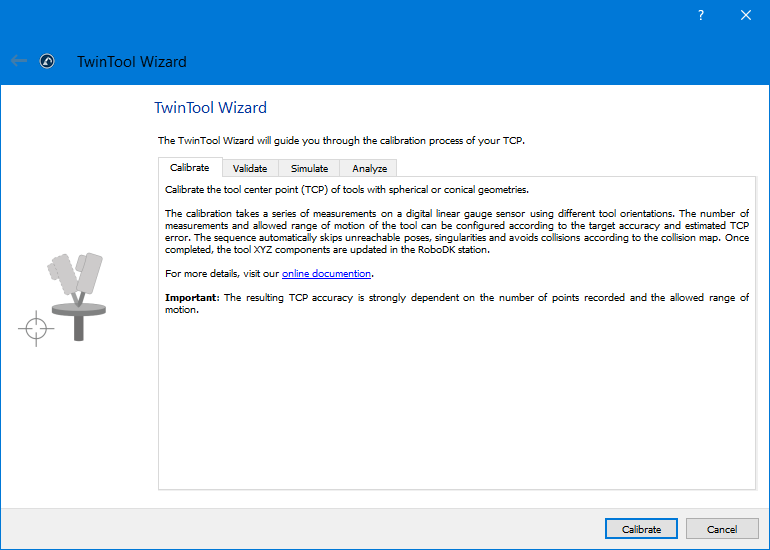
CDO : Réglez l'erreur d'outil estimée à 5 mm ou moins si vous avez déjà une bonne estimation du CDO. La procédure d'étalonnage sera ainsi plus rapide.
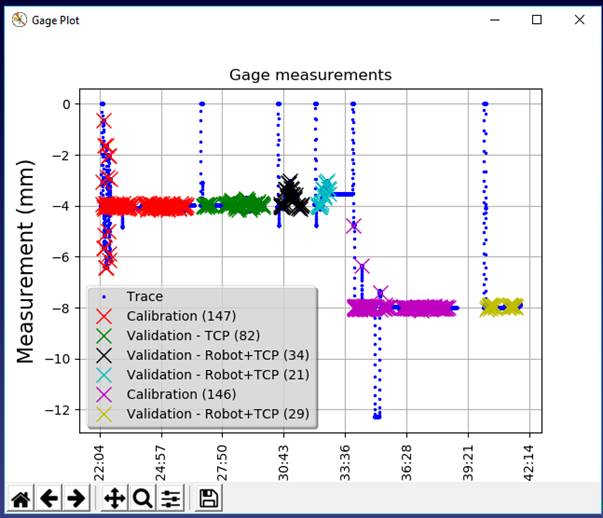
Résultats de l'étalonnage
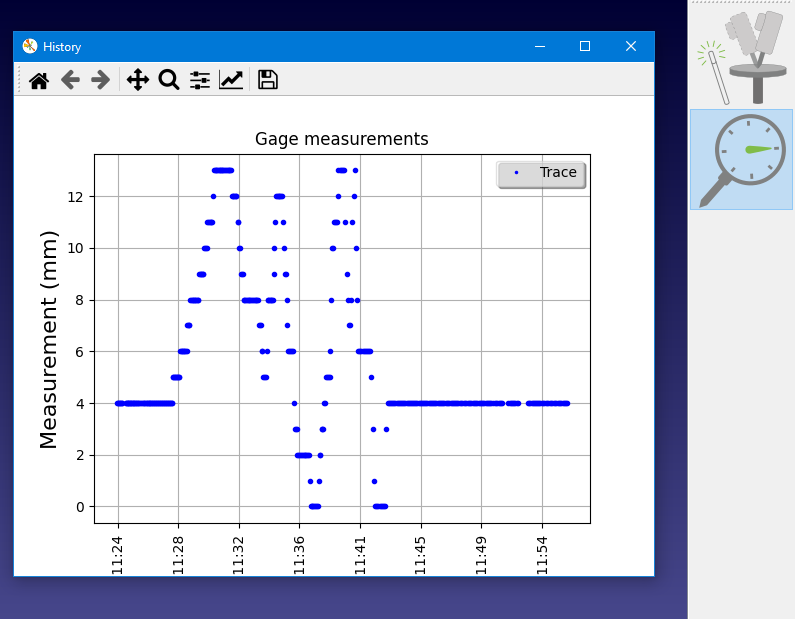
Une fois la séquence d'étalonnage terminée, vous serez dirigé vers l'onglet
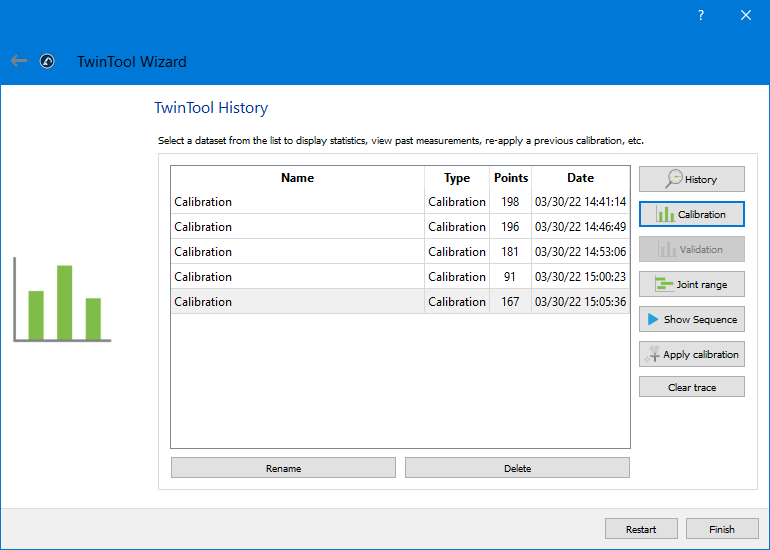
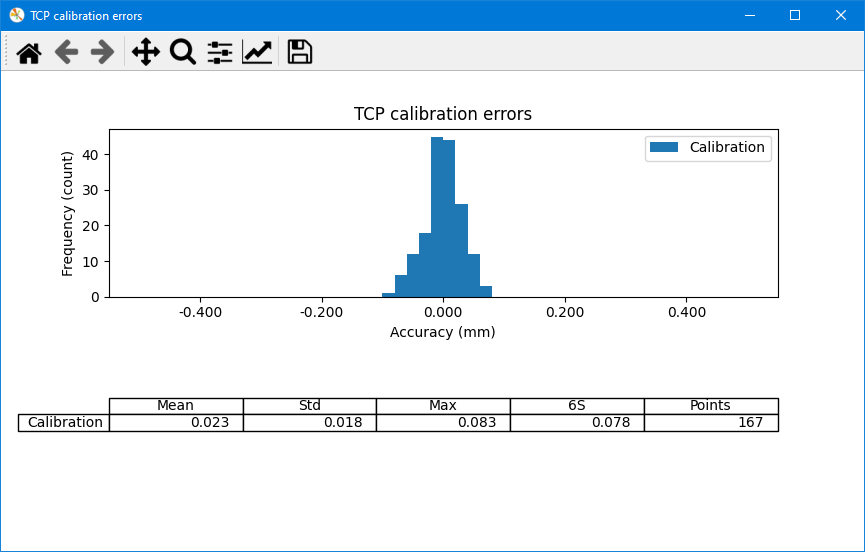
En cliquant sur le bouton Étalonnage, vous verrez un graphique montrant les résultats de l'étalonnage. Le point central de l'outil (CDO) est calculé à l'aide de la cinématique nominale du robot.
Validation
Une fois que vous avez exécuté la séquence d'étalonnage, vous pouvez effectuer des tests de validation. Ces tests de validation peuvent être effectués au même endroit que le capteur ou à des endroits différents.
Valider l'étalonnage de l'outil
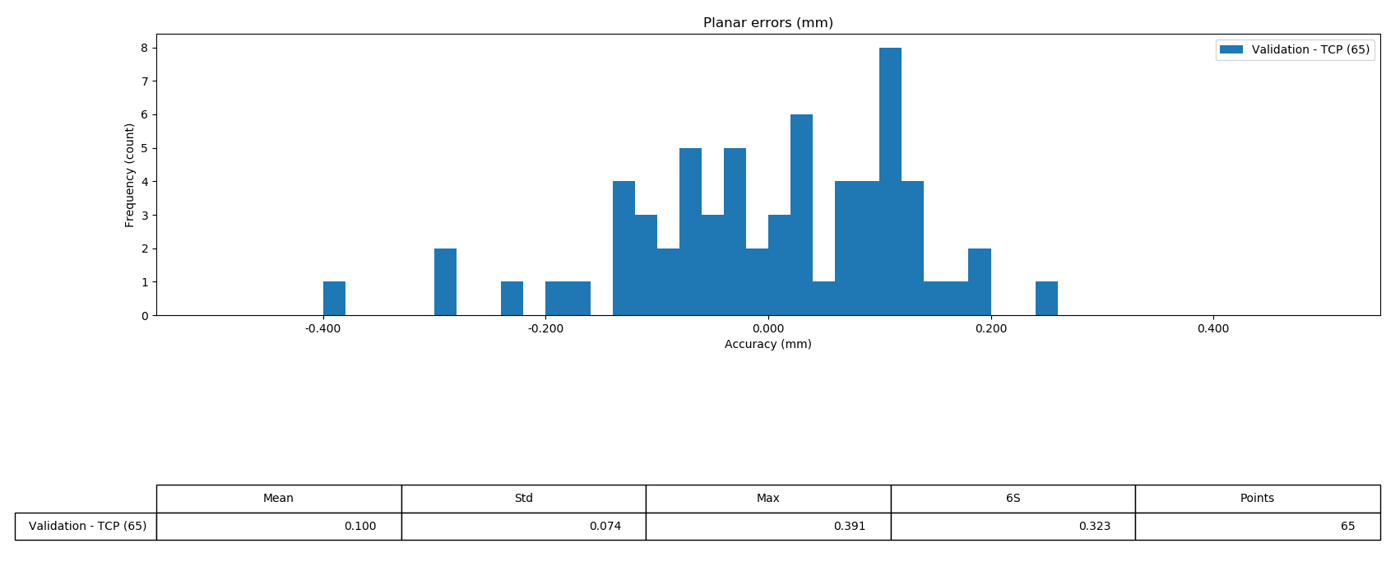
Sélectionnez
Sélectionnez Validation pour afficher un résumé et quelques statistiques sur les résultats. Ces statistiques correspondent aux erreurs planaires détectées par le capteur.
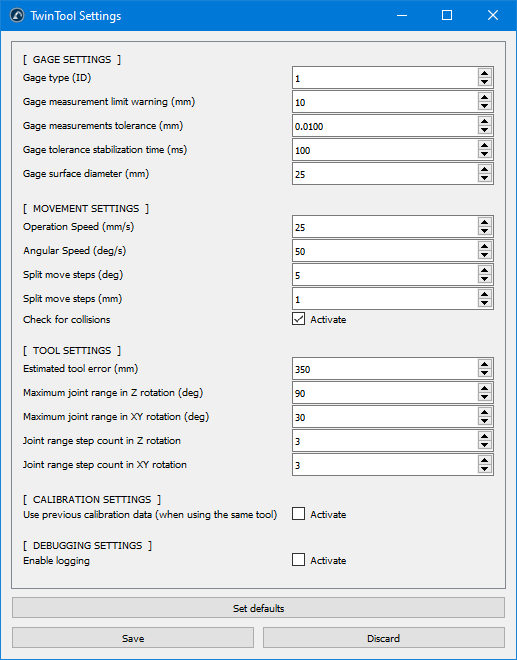
Paramètres
Cette section décrit les paramètres et options supplémentaires que vous pouvez modifier pour mieux personnaliser vos étalonnages et tester la précision du robot.
Paramètres d'étalonnage
Sélectionnez TwinTool➔ Advanced Settings pour ouvrir la liste complète des paramètres avancés. La plupart de ces paramètres sont demandés et définis par l'assistant.