Configuration de l’étalonnage du Robot
Deux objets sont nécessaires : un objet outil (tenu par le robot) et un objet référence de base (statique dans la cellule). Le tracker doit pouvoir voir l’objet outil et l’objet de référence de base pour chaque mesure. Ces objets sont également connus sous le nom de « modèles » (dans Vxelements) et sont définis par un ensemble de cibles attachées aux objets de l’outil et du repère de référence. Le tracker suit la position de ces cibles en fournissant le repère de référence de ces objets comme mesure par rapport au tracker. RoboDK prend chaque mesure comme position de l’outil par rapport au repère de référence de base, de sorte que le tracker peut être déplacé sans modifier les mesures.
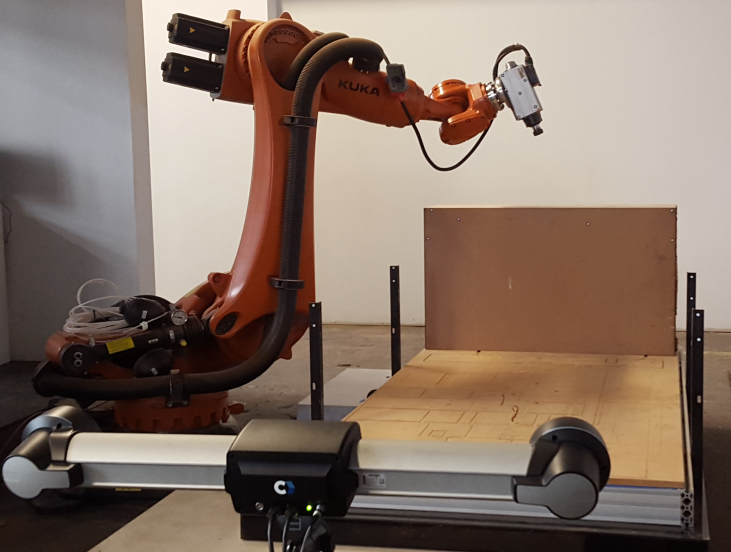
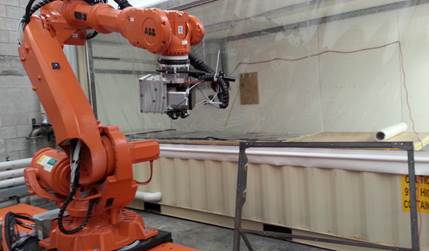
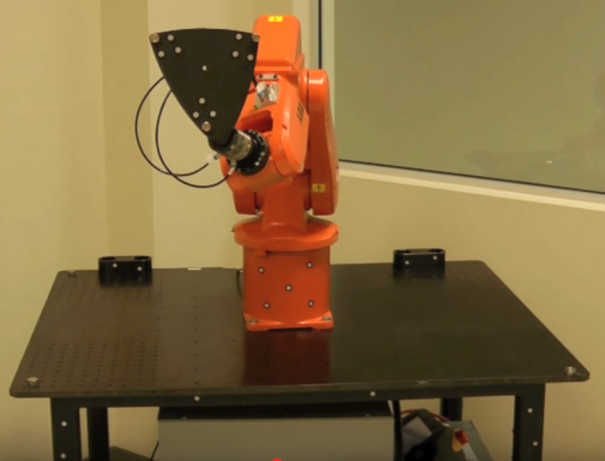
Il est nécessaire de rattacher un groupe de cibles à l’outil et au repère de référence pour permettre le suivi correct de ces objets. Les images suivantes montrent quelques exemples de configurations appropriées :

Les sous-sections suivantes doivent être exécutées de façon séquentielle pour être prêts à commencer à prendre des mesures. Enfin, il sera nécessaire de connecter le tracker et le robot à l’ordinateur pour automatiser la procédure de prise de mesures.
Sonder les repères de référence
Premièrement, deux modèles sont nécessaires : un modèle de l’outil et un modèle du repère de base. Un modèle est un objet défini comme une liste de points (coordonnées X, Y, Z) correspondant aux cibles par rapport à la référence du modèle (outil ou référentiel de base). Vous pouvez en option utiliser le Handyprobe pour placer le repère de référence là où vous le souhaitez.
Suivre ces étapes deux fois pour définir l’outil et les modèles de base :
1.Démarrer Vxelements et connecter le tracker. Étalonner le tracker ainsi que le Handyprobe si nécessaire.
2.Sélectionner Tracking Models dans l’arborescence de gauche dans Vxelements et sélectionner Detect model. Sélectionner les cibles qui correspondent à un modèle (outil ou objet) et sélectionner « Accept ».
Astuce : Garder enfoncé CTRL pour sélectionner un groupe de cibles.

3.Le repère de référence de l’objet peut être placé à une position spécifique par rapport à certaines caractéristiques de l’objet. Cette étape est facultative mais fortement recommandée si vous avez besoin de placer avec précision les caractéristiques du TCP par rapport à la bride du robot. Par exemple, vous pourriez placer avec précision l’axe Z de l’outil le long d’un cylindre de référence utilisé comme axe de broche.
Pour déplacer correctement le repère de référence de l’objet, vous devez utiliser le Handyprobe et apporter ces fonctionnalités dans la session virtuelle Vxelements. Le modèle utilisé doit être défini comme le modèle de positionnement de sorte que les caractéristiques soient étudiées par rapport à ce modèle. Il est possible de sonder des points, des lignes, des plans, des cylindres, des cônes et de définir des repères de référence par rapport à ces caractéristiques.
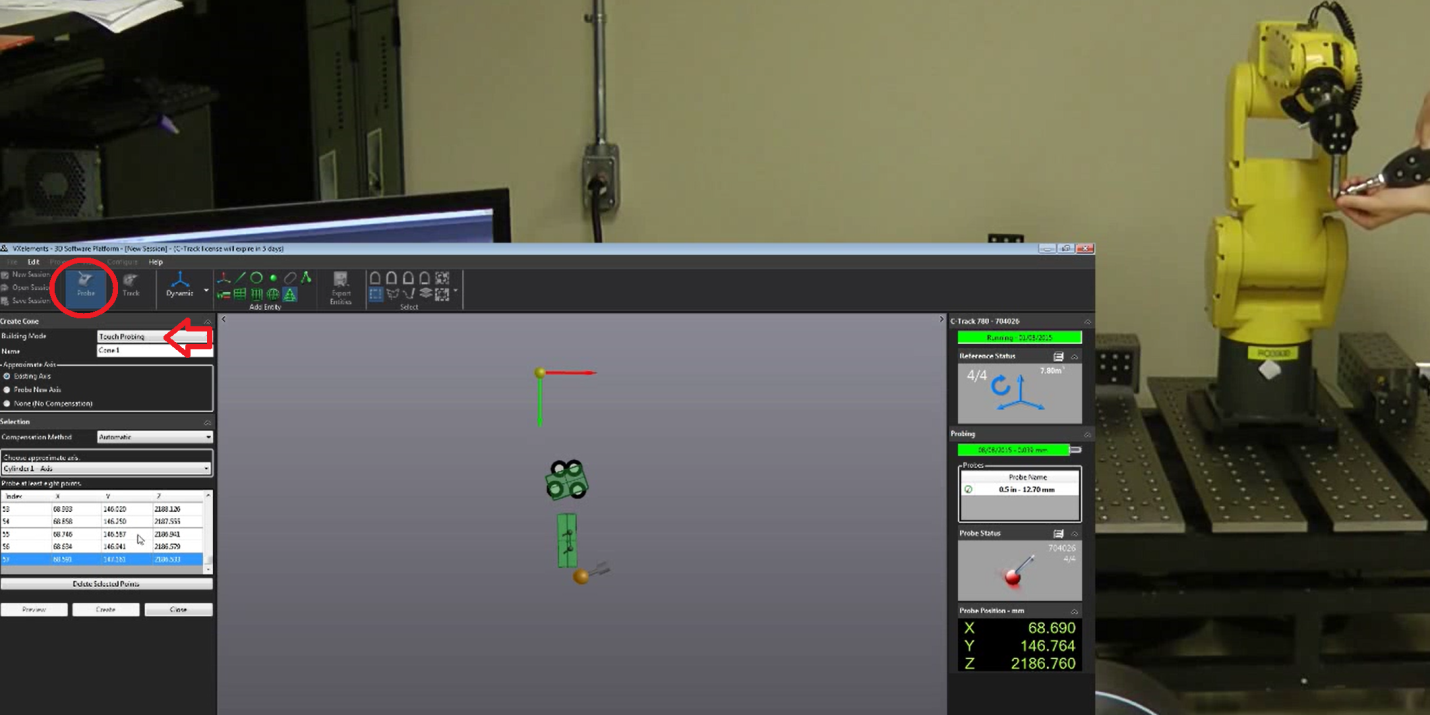
Lorsque vous avez terminé, il est possible d’exporter le modèle comme un fichier txt. Vous voyez les cibles dans le fichier texte comme une liste de points XYZ.
Connexion au tracker
L’adresse IP du tracker est nécessaire pour définir correctement la communication dans RoboDK. S’assurer que Vxelements ne fonctionne pas et suivre les étapes ci-dessous pour vérifier la communication avec le tracker :
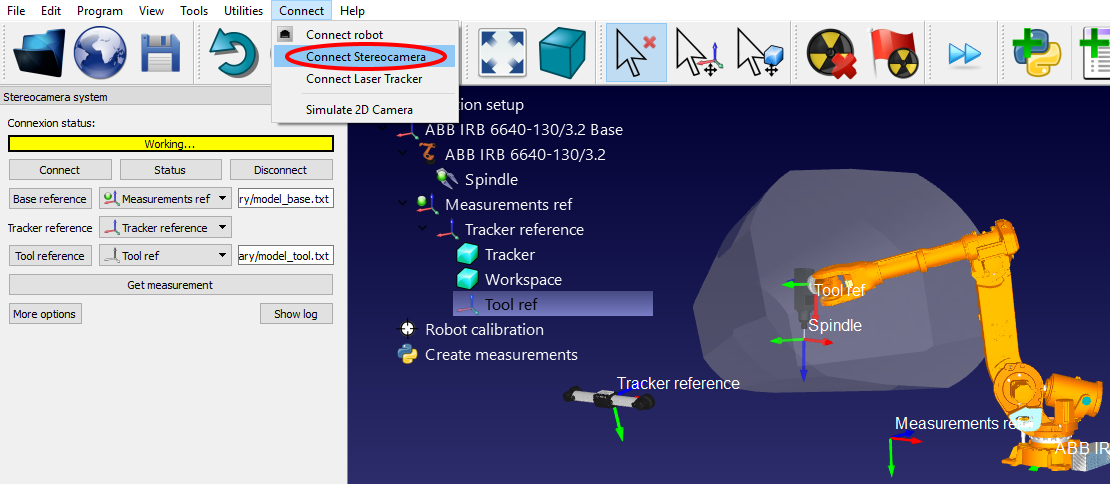
a.Sélectionner le menu “Connect➔Connect Stereocamera”. Une nouvelle fenêtre doit s’ouvrir.
b.Saisir le « modèle de base » et le « modèle d’outil », sous forme de fichiers texte (générés dans la section précédente). Il s’agit de la position des cibles qui définissent respectivement le repère de référence et le repère d’outils.
c.Sélectionner le bouton “Connect”.
d.Lorsque la connexion réussit, définir les modèles de base et d’outil sous forme de fichiers texte (.txt).
Une version intégrée de Vxelements démarre et après quelques secondes, vous avez un message vert indiquant « Ready » si la connexion est réussie. Les fenêtres Vxelements peuvent être fermées et la connexion reste active. Si la connexion échoue, bien s’assurer qu’aucun processus Vxelements ne s’exécute en arrière-plan de la barre des tâches Windows ou du gestionnaire des tâches (sélectionner CTRL+ALT+SUPPR pour forcer l’arrêt du processus d’implémentation Vxelementsapiimplementation), puis sélectionner Connect dans RoboDK pour réessayer.
Connexion au robot
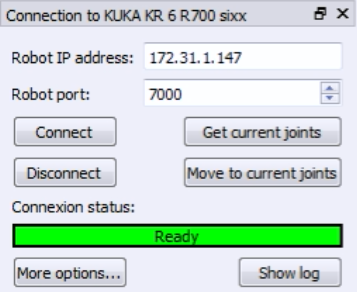
L’adresse IP du robot (ou le numéro de port COM pour les connexions RS232) est nécessaire pour régler correctement la communication avec RoboDK. Suivre ces étapes pour vérifier la communication avec le robot :
1.Sélectionner Connecter➔Connecter robot. Une nouvelle fenêtre va apparaitre.
2.Définir l’adresse IP et le port du robot (ou le port COM si la connexion est par RS232).
3.Cliquer sur le bouton Connect.
4.Reporter-vous à l’annexe si des problèmes surviennent.
Si la connexion est réussie, vous voyez un message vert affichant Ready. La position du robot virtuel devrait correspondre exactement à la position du robot réel en sélectionnant Get current joints. Sinon, sélectionner Move to current joints pour déplacer le robot à la position actuelle définie dans le simulateur. La fenêtre peut être fermée et la connexion reste active.