Connexion au tracker
L’adresse IP du tracker est nécessaire pour définir correctement la communication dans RoboDK. S’assurer que Vxelements ne fonctionne pas et suivre les étapes ci-dessous pour vérifier la communication avec le tracker :
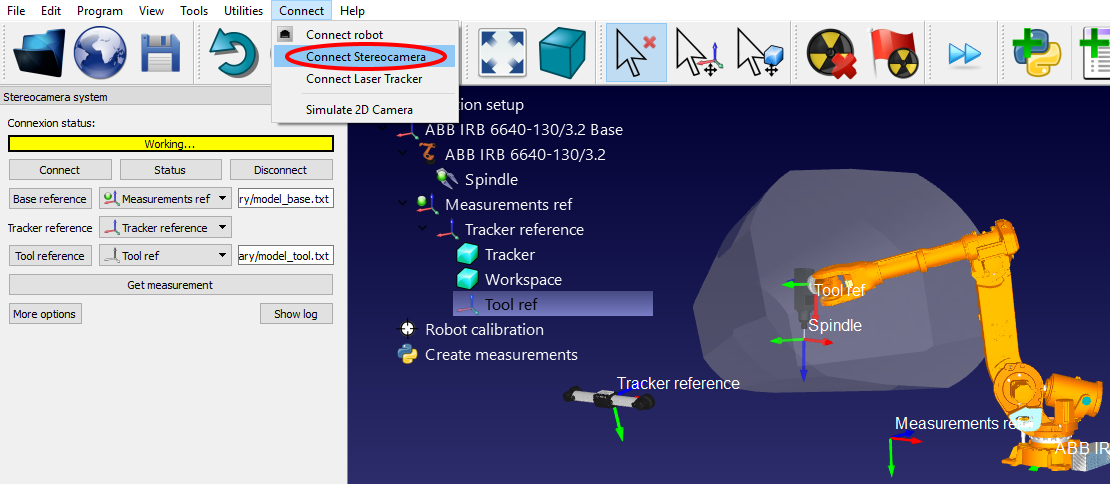
a.Sélectionner le menu “Connect➔Connect Stereocamera”. Une nouvelle fenêtre doit s’ouvrir.
b.Saisir le « modèle de base » et le « modèle d’outil », sous forme de fichiers texte (générés dans la section précédente). Il s’agit de la position des cibles qui définissent respectivement le repère de référence et le repère d’outils.
c.Sélectionner le bouton “Connect”.
d.Lorsque la connexion réussit, définir les modèles de base et d’outil sous forme de fichiers texte (.txt).
Une version intégrée de Vxelements démarre et après quelques secondes, vous avez un message vert indiquant « Ready » si la connexion est réussie. Les fenêtres Vxelements peuvent être fermées et la connexion reste active. Si la connexion échoue, bien s’assurer qu’aucun processus Vxelements ne s’exécute en arrière-plan de la barre des tâches Windows ou du gestionnaire des tâches (sélectionner CTRL+ALT+SUPPR pour forcer l’arrêt du processus d’implémentation Vxelementsapiimplementation), puis sélectionner Connect dans RoboDK pour réessayer.