Mesurer la base
Ces mesures peuvent être effectuées n’importe où sur la bride de l’outil en mesurant la même cible pour les 6 mesures. Pour démarrer les mesures, sélectionner Mesure dans la section Base setup. La fenêtre suivante s’ouvre. Ensuite, sélectionner Start Measure et le robot se déplacera séquentiellement à travers les mesures programmées
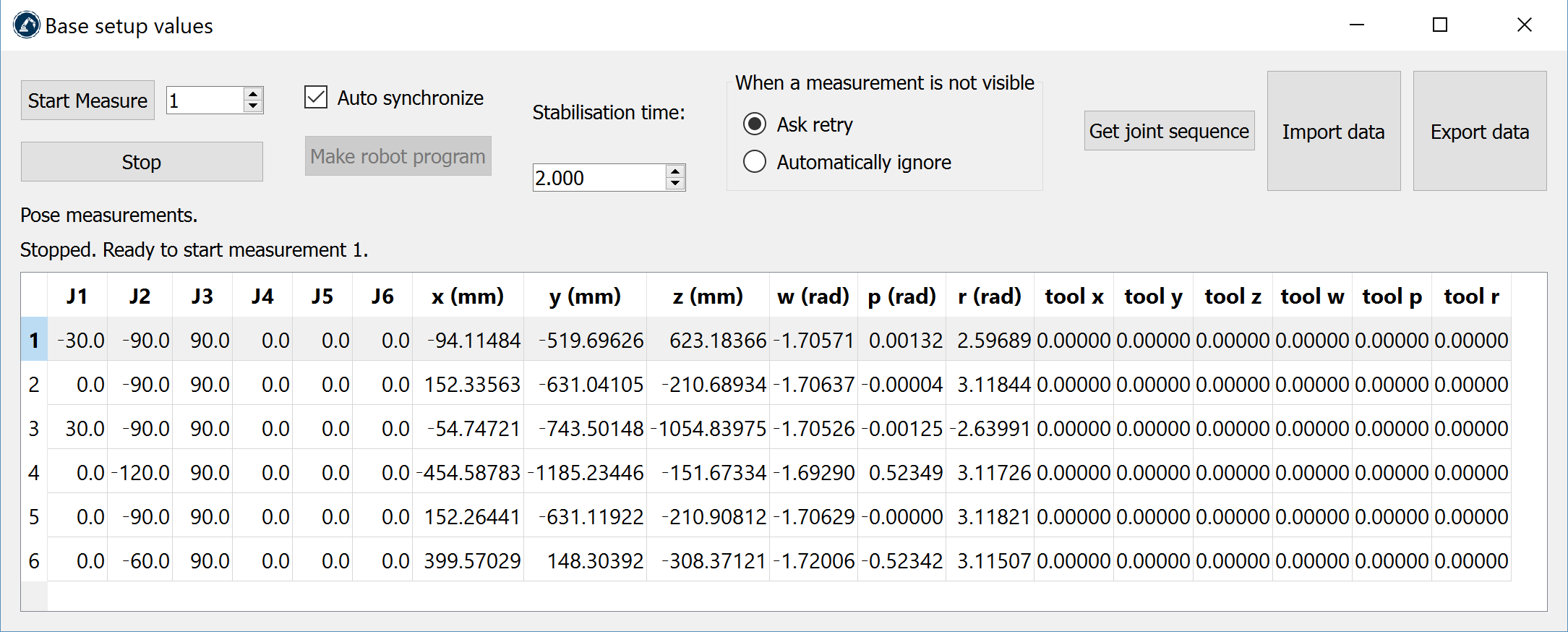
Fermer la fenêtre lorsque les mesures sont terminées et que le repère de référence des mesures est mis à jour par rapport au repère de base du robot. Si vous n’avez pas sélectionné de repère de référence, vous pouvez ajouter une référence (sélectionner Programme ➔ Ajouter un Repère) et le placer sous la référence de base du robot (Glisse et dépose dans l’arborescence).
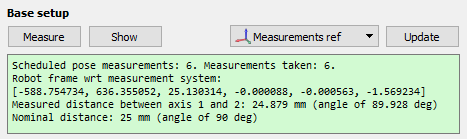
Le résumé indiquera la position et l’orientation ou le repère de référence du robot par rapport au repère de référence d’étalonnage (format [x,y,z,w,p,r], en mm et radians).
Une fois cette étape terminée, il est possible d’afficher avec précision l’espace de travail du tracker par rapport au robot dans RoboDK en temps réel.