Sonder les repères de référence
Premièrement, deux modèles sont nécessaires : un modèle de l’outil et un modèle du repère de base. Un modèle est un objet défini comme une liste de points (coordonnées X, Y, Z) correspondant aux cibles par rapport à la référence du modèle (outil ou référentiel de base). Vous pouvez en option utiliser le Handyprobe pour placer le repère de référence là où vous le souhaitez.
Suivre ces étapes deux fois pour définir l’outil et les modèles de base :
1.Démarrer Vxelements et connecter le tracker. Étalonner le tracker ainsi que le Handyprobe si nécessaire.
2.Sélectionner Tracking Models dans l’arborescence de gauche dans Vxelements et sélectionner Detect model. Sélectionner les cibles qui correspondent à un modèle (outil ou objet) et sélectionner « Accept ».
Astuce : Garder enfoncé CTRL pour sélectionner un groupe de cibles.

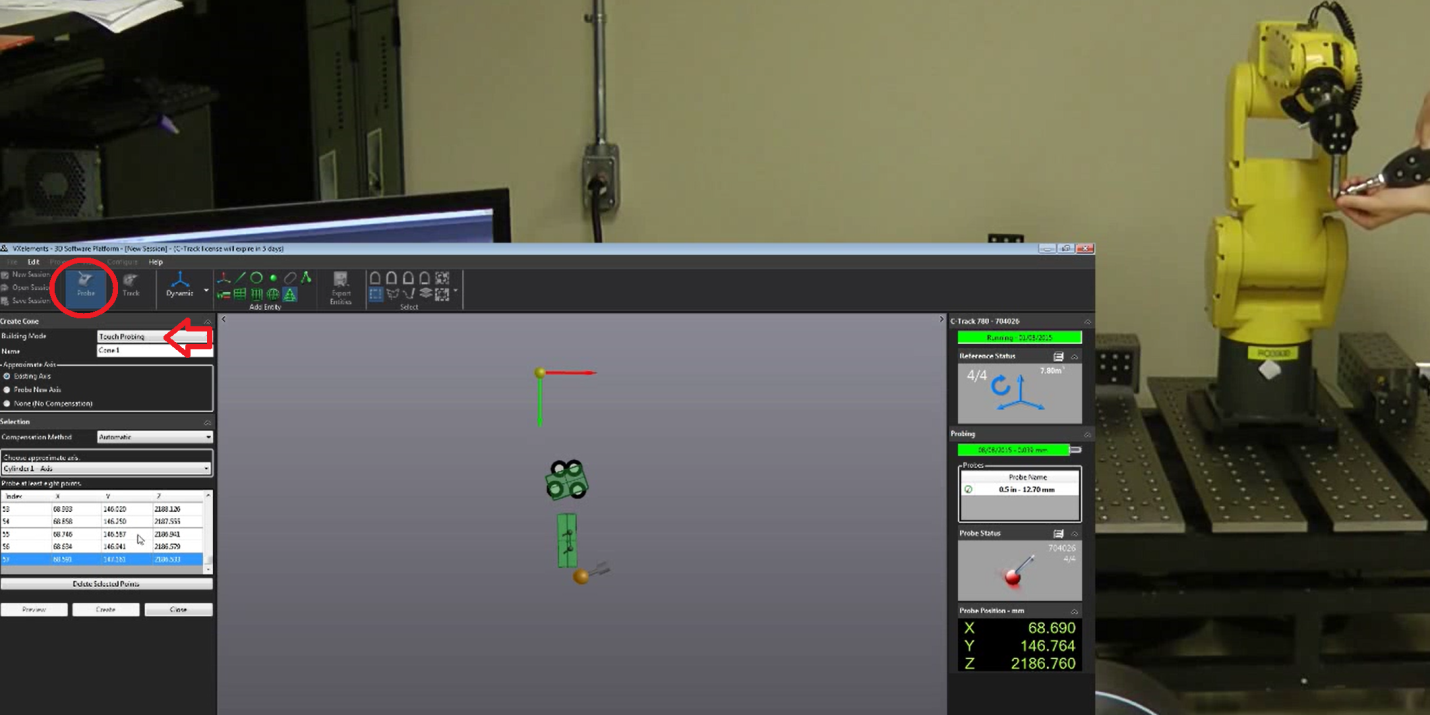
3.Le repère de référence de l’objet peut être placé à une position spécifique par rapport à certaines caractéristiques de l’objet. Cette étape est facultative mais fortement recommandée si vous avez besoin de placer avec précision les caractéristiques du TCP par rapport à la bride du robot. Par exemple, vous pourriez placer avec précision l’axe Z de l’outil le long d’un cylindre de référence utilisé comme axe de broche.
Pour déplacer correctement le repère de référence de l’objet, vous devez utiliser le Handyprobe et apporter ces fonctionnalités dans la session virtuelle Vxelements. Le modèle utilisé doit être défini comme le modèle de positionnement de sorte que les caractéristiques soient étudiées par rapport à ce modèle. Il est possible de sonder des points, des lignes, des plans, des cylindres, des cônes et de définir des repères de référence par rapport à ces caractéristiques.
Lorsque vous avez terminé, il est possible d’exporter le modèle comme un fichier txt. Vous voyez les cibles dans le fichier texte comme une liste de points XYZ.