Annexe I – Mastering pour les axes 1 et 6
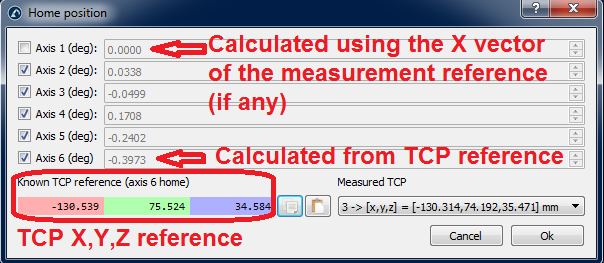
Vous devez prêter une attention particulière si vous voulez récupérer les valeurs de mastering/origine pour les axes 1 et 6. Ces valeurs sont directement liées au repère de base du robot pour l’axe 1 et au repère du TCP pour l’axe 6. Par conséquent, des mesures externes doivent être prises pour définir correctement ces valeurs. La fenêtre suivante fenêtre s’affiche après avoir sélectionné « Make mastering program » dans le menu d’étalonnage.
Les deux procédures suivantes doivent être suivies pour définir correctement les paramètres de mastering pour ces deux axes.
Reference de l’Axe 6
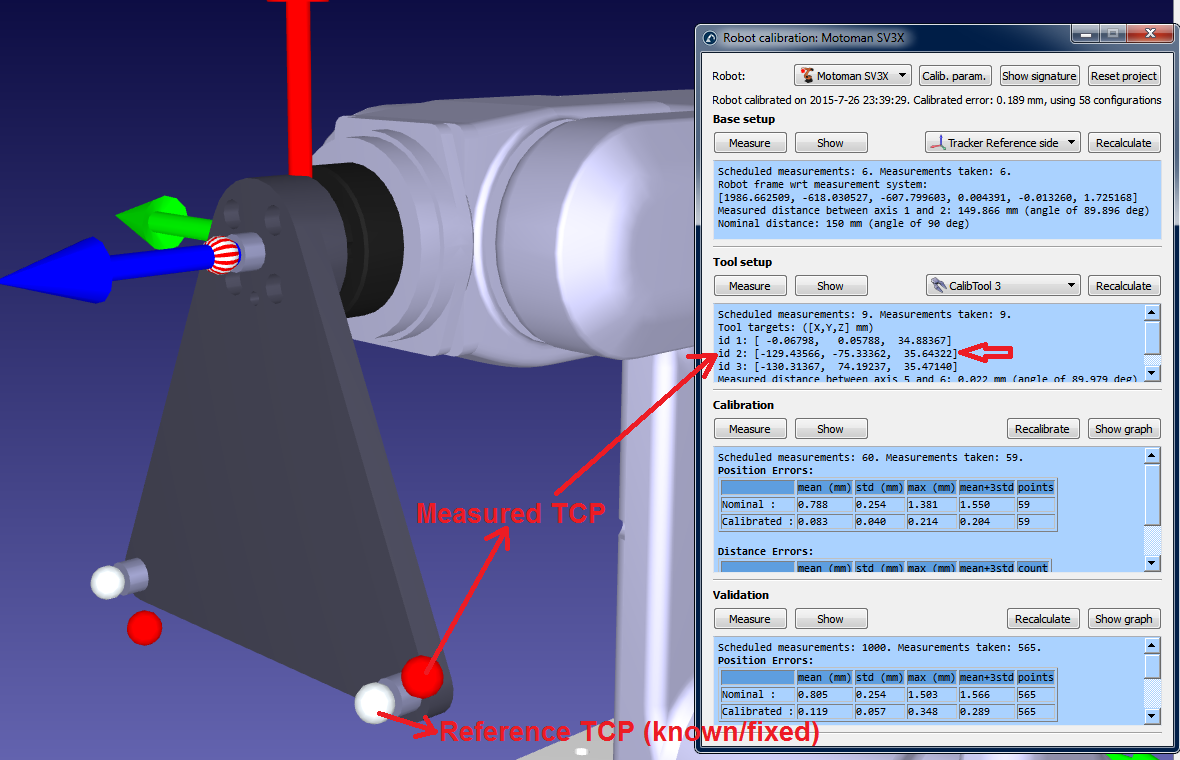
Utiliser une cible de référence pour régler correctement la position d’origine de l’axe 6. Le décalage de l’angle sera une rotation autour de l’axe Z de la bride, nécessaire pour adapter au mieux le TCP mesuré (X, Y, Z) à la référence TCP connue. Le TCP mesuré (voir l’image suivante) est l’un des TCP qui a été mesuré à l’étape deux de la procédure d’étalonnage. La référence TCP est une référence connue qui correspond à l’un des TCP de l’outil d’étalonnage utilisé.
Idéalement, le TCP de référence doit être mesuré par le CMM par rapport à la bride de l’outil (une réplique de la bride de l’outil robot serait préférable). Il est possible aussi d’utiliser un nouveau robot pour mesurer (étape deux de la procédure d’étalonnage) le TCP pour la première fois et utiliser un TCP mesuré comme référence. Il est important d’utiliser une goupille de goujon et/ou une bride d’outil appropriée pour s’assurer que l’effecteur est toujours placé à la même position.
Référence de l’axe 1
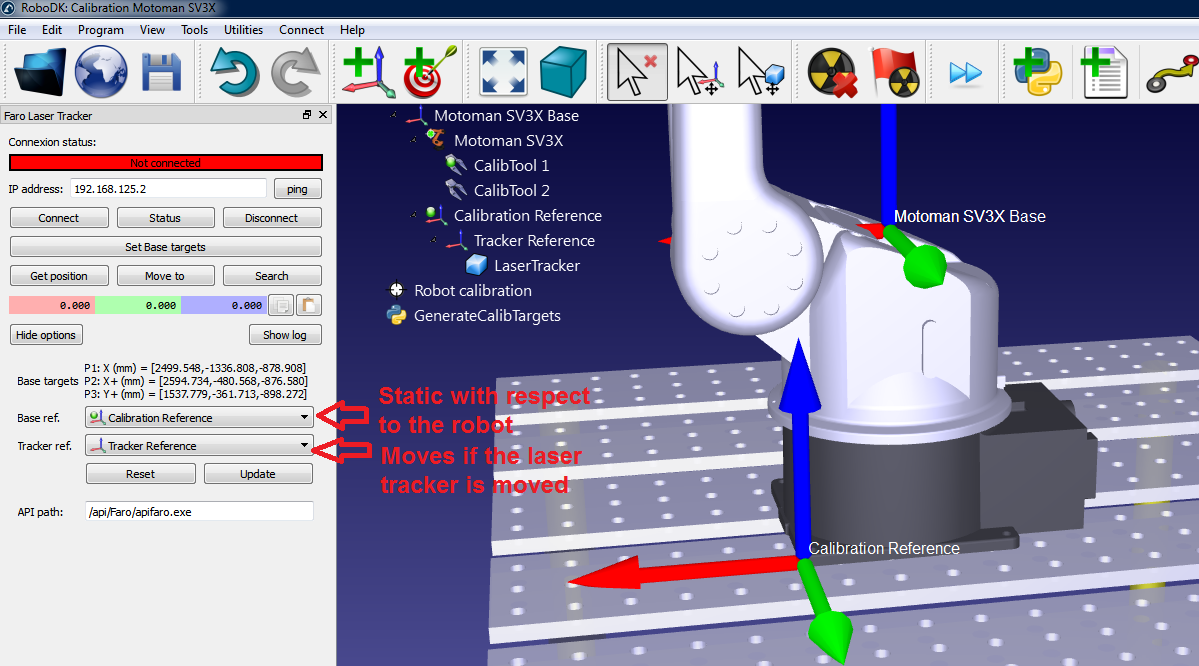
Mesurer correctement trois cibles de base avant de commencer un étalonnage de robot pour aligner l’axe 1 avec le repère de base du robot réel. Ces cibles de base doivent être choisies afin que le repère de référence puisse être trouvé par rapport au robot.
La position de « départ » de l’axe 1 dépend directement des trois cibles de base ainsi que de la configuration de la base du robot. La configuration de la base du robot est la première étape d’étalonnage, où le repère de base du système de mesure est placé par rapport au repère de base du robot en déplaçant et en mesurant les axes 1 et 2.
Les cibles de base du système de mesure peuvent être définies en appuyant sur « Définir les cibles de base » (voir l’image suivante). Il s’agit de 3 mesures qui définiront le repère de référence du robot souhaité (les 2 premières mesures définissent l’axe des X et le troisième point l’axe des Y positifs). Vous devriez utiliser des points de référence appropriés liés à la base du robot afin que cette procédure soit reproductible.
L’angle de correction pour l’articulation 1 sera l’angle entre l’axe X de la référence de base mesuré à travers 3 points et la référence de base mesurée en déplaçant les axes 1 et 2 du robot. Bien sûr, les deux vecteurs sont précédemment projetés au plan XY de la référence de base obtenue en touchant les 3 points.