Annexe II – Test du laser tracker Faro
L’étalonnage du robot exige que des mesures soient prises à partir du robot avec un système de mesure. Pour prendre ces mesures, il est nécessaire d’avoir un tracker laser Faro communiquant avec un ordinateur. La communication se fait via un driver exe qui peut être exécuté en mode console.
Par exemple, Faro offre une application gratuite appelée « Tracker Utilities ». Cette application peut initialiser le tracker laser et peut effectuer entre autres des contrôles de santé.
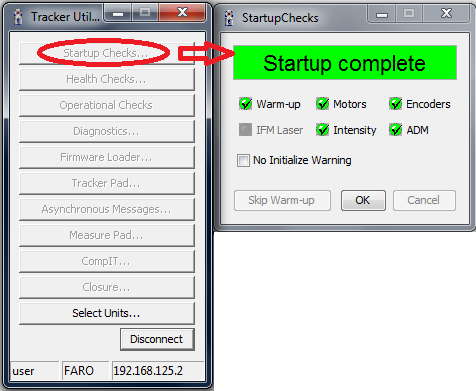
Pour initialiser le tracker, démarrer l’application « Tracker Utilities », vous connecter à l’aide de l’adresse IP du tracker, puis sélectionner « Startup Checks ». Lorsque le tracker s’initialise, placer une cible SMR de 1,5’’ (pouces) en position d’origine avant l’initialisation. Sinon, le voyant vert clignotera après l’initialisation et les mesures ne seront pas valides.
Lorsque l’initialisation est réalisée, vous pouvez lire le message “Startup complete”, tel que montré dans les images suivantes.

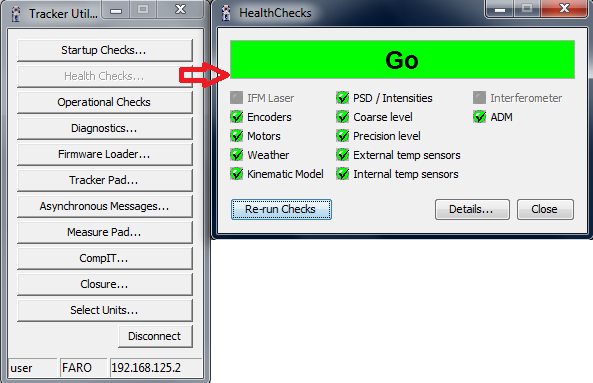
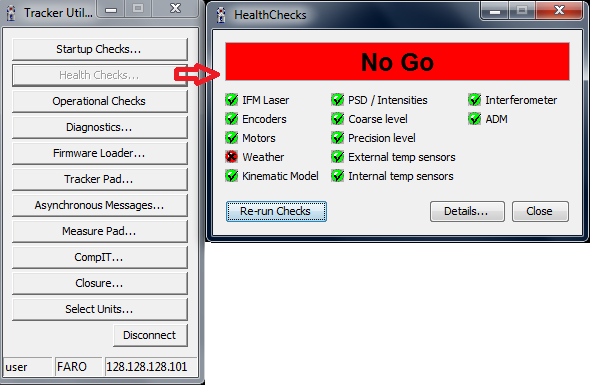
Si vous avez des problèmes avec le tracker, effectuer des vérifications de santé en appuyant sur « Health Checks… ». Les deux images suivantes montrent respectivement une vérification de réussite et une vérification d’échec. Parfois, les problèmes sont résolus après la reconnexion des câbles et le redémarrage du tracker laser.
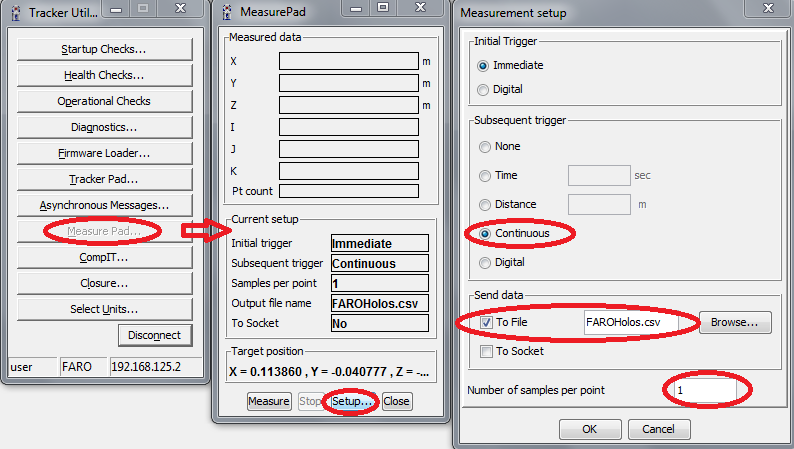
Pour finir, utiliser le pavé de mesure (Measure pad) pour prendre quelques mesures. Le tracker laser peut suivre une cible et mesurer la position XYZ à une fréquence de 1000 Hz. Si vous définissez 1 échantillon par point et déclencheur continu, le tracker enregistrera 1000 mesures par seconde dans un fichier CSV.
Il est possible d’utiliser cette fonction pour mesurer le parcours d’un robot et utiliser le contrôle de précision du parcours de RoboDK pour vérifier la précision, la vitesse et l’accélération le long du parcours.