Calibration du repère de référence
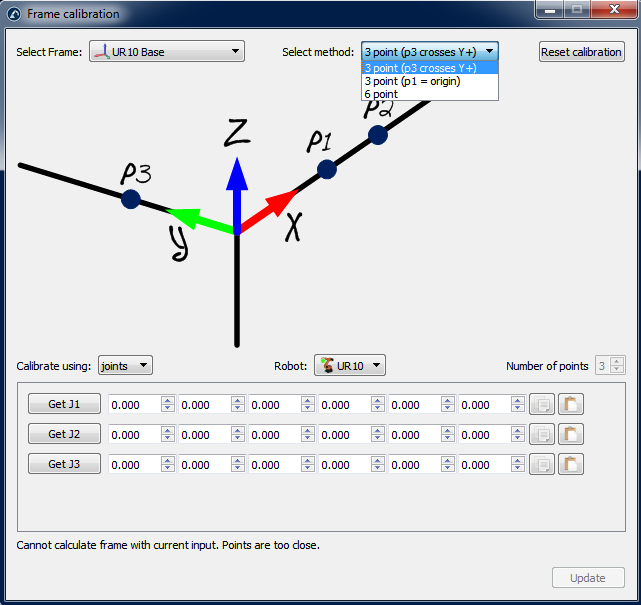
Sélectionner Utilitaires➔Définir repère (user frame) pour étalonner un repère. Il est possible de définir un repère en utilisant différentes méthodes. Dans l’exemple du logiciel, un repère de référence est défini par trois points : les points 1 et 2 définissent la direction de l’axe des X et le point 3 définit l’axe des Y positifs.
Important : Il est recommandé d’utiliser des cibles joint et d’activer la précision du robot avant d’étalonner le repère de référence, car la précision du bras du robot aidera à bien définir le repère de référence.
Note : Plus d’information disponible concernant la calibration d’un repère utilisateur dans la section astuce.