Calibration robot
L’étalonnage du robot est divisé en 4 étapes. Chaque étape nécessite de prendre un ensemble de mesures. Ces quatre étapes doivent être suivies dans l’ordre :
1.Mesures de référence de la base (3 minutes).
2.Mesures de référence de l’Outil (3 minutes)
3.Mesures de Calibration (7 minutes, 60 mesures)
4.Mesures de Validation (7 minutes, 60 mesures).
La vidéo suivante montre comment effectuer cet étalonnage en 20 minutes : https://www.robodk.com/robot-calibration#tab-lt. Les mesures de validation (étape 4) ne sont pas obligatoires pour étalonner le robot, cependant, ils donnent un point de vue objectif des résultats. Il est également possible de voir l’impact de l’étalonnage du robot dans une zone et sa validation dans une autre zone.
Sélectionner le bouton Mesure pour chacun des quatre ensembles de mesures. Cela ouvrira une nouvelle fenêtre qui permet de prendre de nouvelles mesures ainsi que d’importer et d’exporter des mesures existantes dans un fichier texte (format csv ou txt)
Mesurer la base
Ces mesures peuvent être effectuées n’importe où sur la bride de l’outil si vous mesurez la même cible pour les 6 mesures. Pour démarrer les mesures, sélectionner Mesure dans la section Base setup. La fenêtre suivante s’ouvre. Ensuite, sélectionner Start Measure et le robot se déplacera séquentiellement à travers les mesures programmées
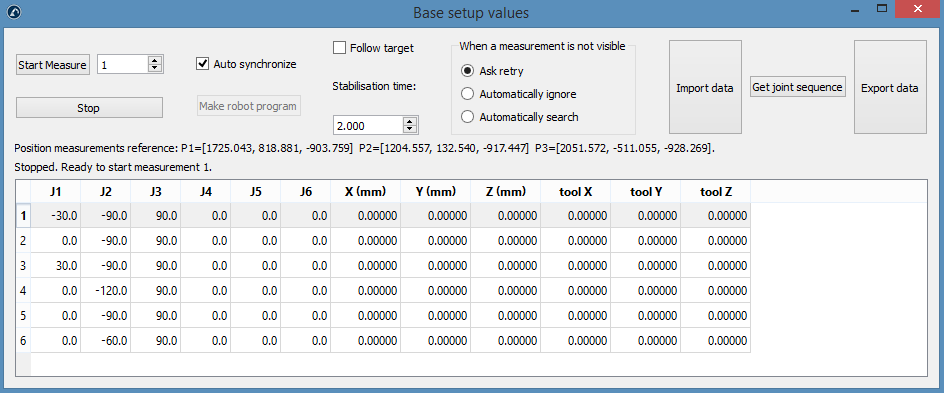
Fermer la fenêtre lorsque les mesures sont terminées et que le repère de référence des mesures est mis à jour par rapport au repère de base du robot. Si vous n’avez pas sélectionné de repère de référence, ajouter une référence (sélectionner Programme ➔ Ajouter un Repère) et le placer sous la référence de base du robot (Glisse et dépose dans l’arborescence).
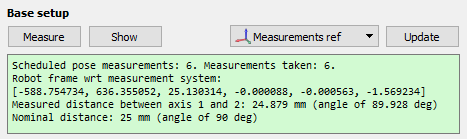
Le résumé indiquera la position et l’orientation ou le repère de référence du robot par rapport au repère de référence d’étalonnage (format [x,y,z,w,p,r], en mm et radians).
Mesurer l’outil
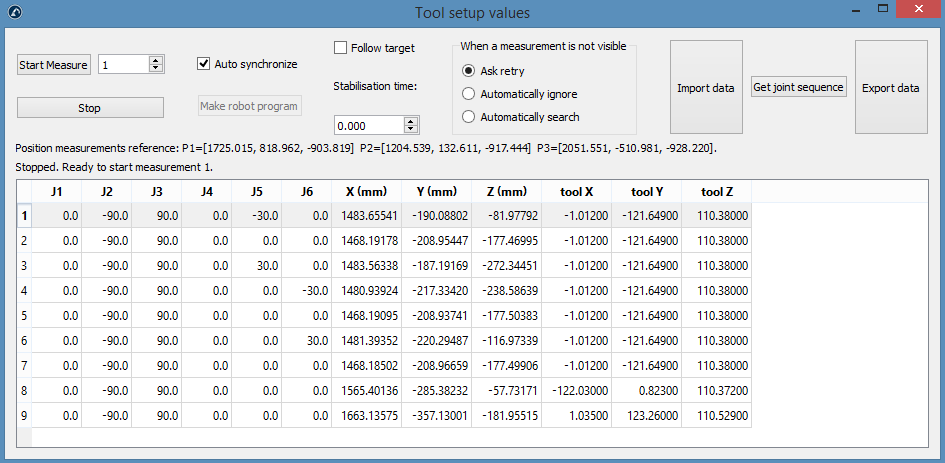
Ces 6 mesures peuvent être effectuées n’importe où sur la bride de l’outil si vous mesurez la même cible pour les 6 mesures. Après cela, chaque TCP que vous voulez mesurer ajouterons une mesure pour le même TCP. Dans ce cas, il y a 3 TCP, donc 6+3=9 mesures au total. Il est possible de double-cliquer sur une mesure afin de continuer la mesure depuis cette position.
Comme dans la section précédente : sélectionner Measure dans la section Tool setup. La fenêtre suivante s’ouvre. Sélectionner Start Measure et le robot se déplacera de façon séquentielle à travers les mesures planifiées. Double-cliquer sur une mesure pour continuer à mesurer à partir de cette position.
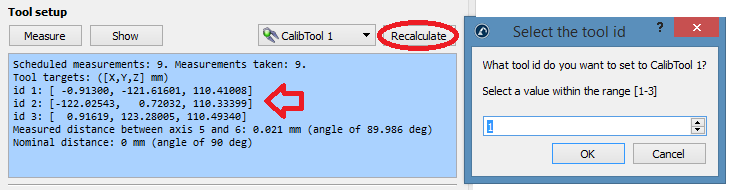
Le résumé montre les informations du TCP étalonné (position et orientation) lorsque la procédure est terminée. La définition du TCP (dans l’image suivante « CalibTool1 ») sera mise à jour automatiquement. Si vous n’avez pas sélectionné de TCP, vous pouvez en ajouter un nouveau (sélectionner « Programme ➔ Ajouter Outil vide ») et sélectionner « Recalculer ». Une nouvelle fenêtre apparait et sélectionner l’id de l’outil en fonction de l’ordre dans lequel les mesures ont été prises. Répéter cette procédure pour mettre à jour autant de TCP qu’il faudra (dans ce cas 3 TCP). L’id de l’outil sera automatiquement détecté si le nom de l’outil termine par un chiffre.
Calibration
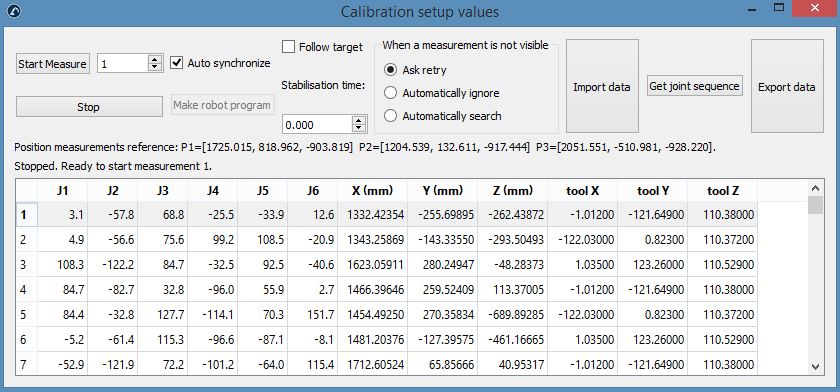
Sélectionner Measure dans la section Calibration pour ouvrir la fenêtre de mesures de calibration robot. Ensuite, sélectionner Start Measure et le robot se déplacera séquentiellement à travers les mesures planifiées. Double-cliquer sur une mesure pour continuer à mesurer à partir de cette position.
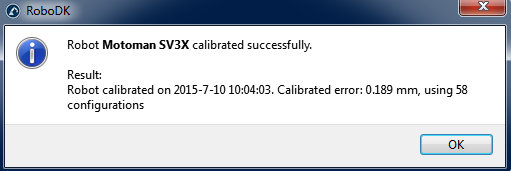
Fermer la fenêtre lorsque les mesures sont terminées. Le robot sera étalonné automatiquement et affichera le message suivant s’il n’y a pas de problème.
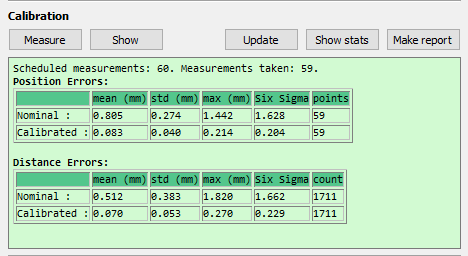
Enfin, l’écran vert affiche certaines statistiques concernant les mesures d’étalonnage et l’amélioration de la précision de ces mesures.
Validation
Ne pas valider la précision du robot en utilisant les mêmes mesures que vous avez utilisées pour calibrer le robot, par conséquent, il est recommandé de prendre des mesures supplémentaires pour valider la précision (avoir un point de vue plus objectif des résultats).
La même procédure d’étalonnage doit être suivie pour prendre les mesures de validation. Le résumé affichera les statistiques de validation. Voir la section Résultats ci-dessous pour plus d’informations.