Configuration hors ligne
Il est recommandé de créer un environnement virtuel de configuration du robot dans RoboDK (configuration hors ligne) avant de commencer à prendre des mesures. Cette section explique comment préparer la station RoboDK hors ligne. Cela peut être fait avant d’avoir le robot et le tracker, seulement en utilisant un ordinateur avec RoboDK installé dessus.
Les exemples de configuration de l’étalonnage RoboDK peuvent être téléchargés à partir du dossier suivant :
https://robodk.com/stations#filter?feature=calibration-project
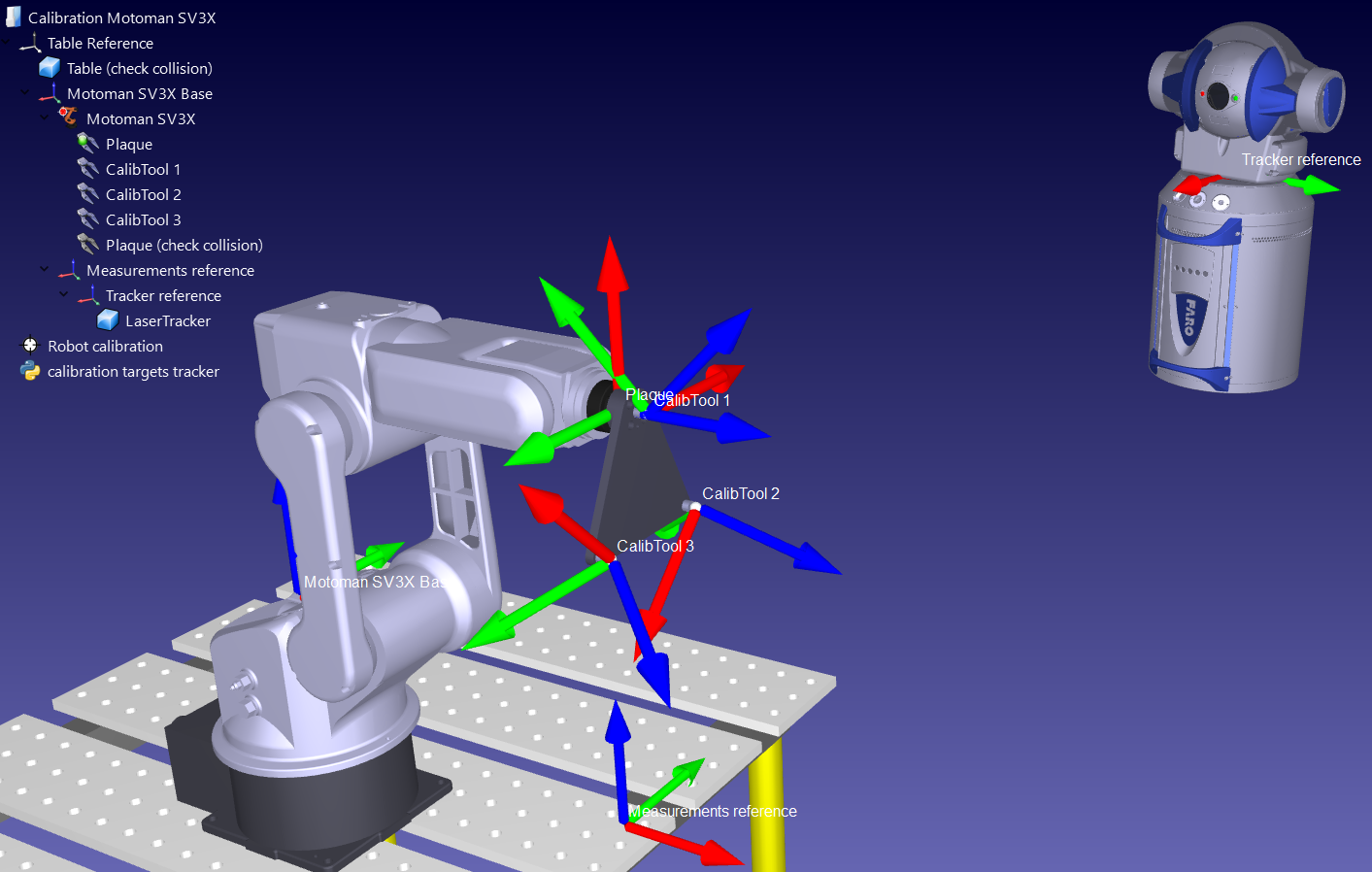
Cette section peut être sautée si vous avez déjà une station hors ligne. Les repères de référence et les repères d’outils peuvent être estimés approximativement. Une station exemple est montrée dans l’image suivante.
Station RoboDK
Une station RoboDK est l’endroit où la station d’environnement virtuelle et les informations d’étalonnage sont stockées. La station est enregistrée en tant que fichier RDK. Suivre les étapes suivantes pour créer une station robot pour l’étalonnage du robot à partir d’un projet vierge (aperçu vidéo) : https://youtu.be/Nkb9uDamFb4):
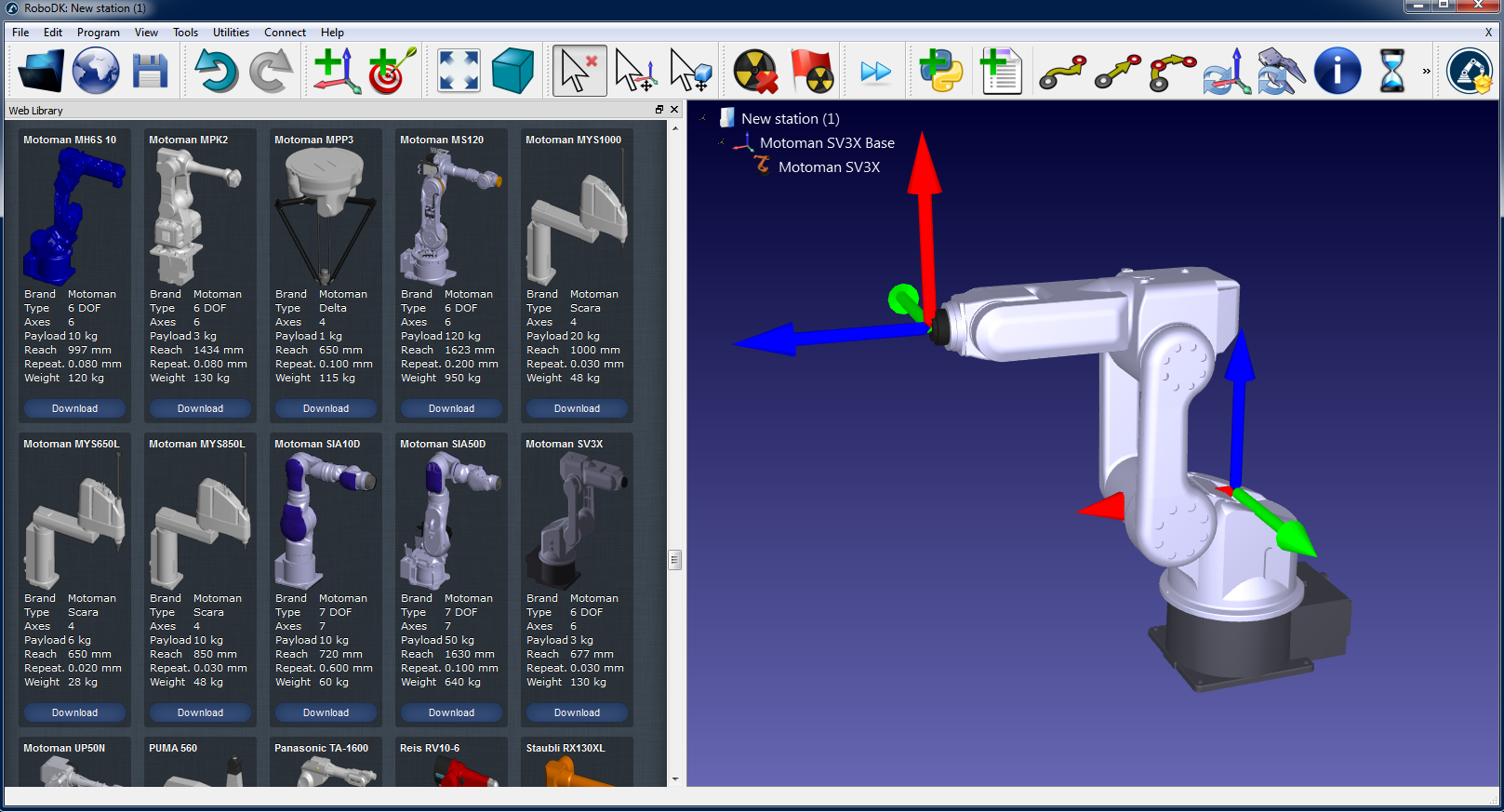
1.Sélectionner un robot :
a.Sélectionner Fichier➔Ouvrir Bibliothèque en ligne. La bibliothèque va s’ouvrir dans RoboDK.
b.Utiliser les filtres pour trouver la marque du robot, la charge admissible, ...
c.Sélectionner Download et le robot apparait automatiquement dans la station.
d.Il est aussi possible de télécharger les fichiers robot (extension .robot) séparément depuis http://robodk.com/library et de les ouvrir avec RoboDK.
2.Modéliser la station virtuelle
a.Ajouter un repère en sélectionnant Programme➔Ajouter un repère.
i.Un repère de « référence des mesures » doit être ajouté par rapport au repère de base du robot.
ii.Un « repère de suivi » doit être ajoutée en ce qui concerne le « repère référence des mesures » que nous venons d’ajouter.
iii.Une autre « repère d’outil » peut être ajoutée par rapport au repère « Référence des mesures » pour visualiser la position de l’outil vue par le tracker.
Astuce 1 : Glisser-déposer des éléments dans l’arborescence pour reconstruire la dépendance qui existe dans le monde réel. Par exemple, la référence du pointeur doit être placée par rapport à la « Référence des mesures ».
Astuce 2 : Déplacer n’importe quel repère de référence ou repère d’outil en maintenant la touche ALT enfoncée et la touche SHIFT+ALT enfoncées. Il est possible également de double-cliquer sur le repère de référence et de saisir les coordonnées.
Astuce 3 : Renommer tous les éléments sélectionnables dans l’arborescence en appuyant sur F2.
b.Ajouter l’objet outil (les fichiers STL, IGES et STEP sont des formats pris en charge) et le glisser-déposer sur le robot (à l’intérieur de l’arborescence des éléments), ce qui convertira l’objet en un outil. Plus d’informations disponibles ici.
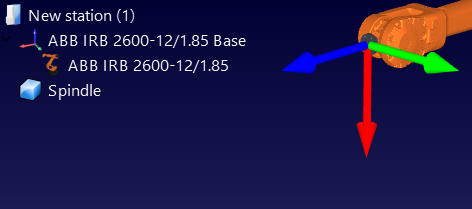
Optionnel : Sélectionner Programme➔Ajouter outil pour ajouter des TCP qu’il est alors possible de visualiser dans la station (pour vérifier les collisions ou autres). Pour définir une valeur approximative du TCP :
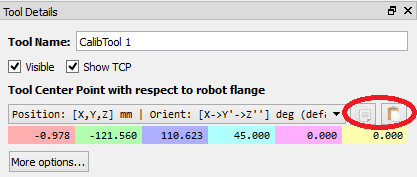
i.Double-cliquer sur le nouvel outil.
ii.Paramétrer une valeur approximative du TCP. copier/coller les 6 valeurs à la fois en utilisant les deux boutons à droite.
iii.Il est recommandé de renommer les TCP utilisés pour l’étalonnage avec le nom « Calibtool id », où id est le numéro cible de l’étalonnage.
c.Ajouter d’autres fichiers CAO 3D (STL, IGES, STEP, SLD, ...) pour modéliser la station virtuelle à l’aide du menu Fichier ➔ Ouvrir… ou faire glisser et déposer des fichiers dans la fenêtre principale de RoboDK.
Astuce 1 : Importer les fichiers 3D de l’espace de travail de mesure et nommer-le Workspace afin que les mesures du robot soient générées à l’intérieur de l’espace de travail du tracker. Sinon, définir l’espace de travail invisible si vous ne voulez pas restreindre les mesures à l’intérieur de l’espace de travail du tracker. De plus amples renseignements sont disponibles dans la prochaine section.
Astuce 2 : Il est possible de sélectionner CTRL+ALT+Shift+P pour bloquer l’export de fichiers 3D confidentiel importés dans RoboDK.
3.Ajouter le module de calibration dans la station :
a.Sélectionner le menu Utilitaires ➔ Calibrer Robot.
b.Sélectionner Laser tracker.
Puis, la fenêtre suivante va apparaitre.
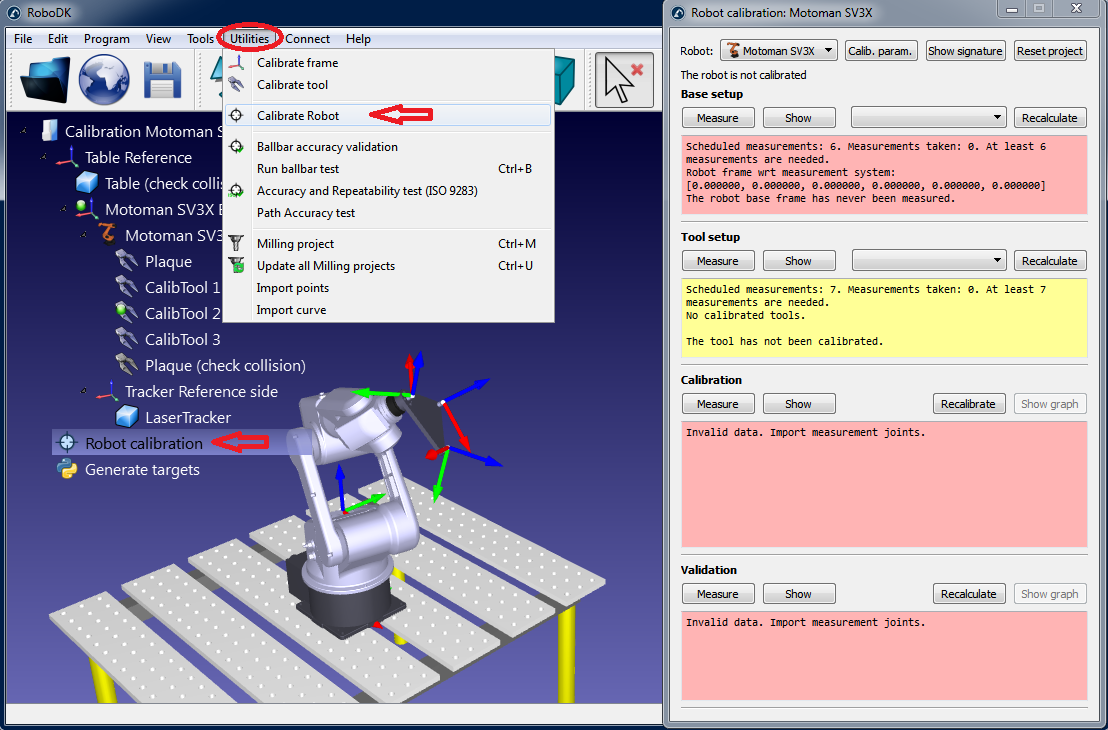
Cette fenêtre peut être fermée pour le moment. Vous pouvez l’ouvrir en double cliquant sur Calibration Robot dans l’arborescence.

4.Enregistrer la station.
a.Sélectionner Fichier➔Enregistrer station.
b.Renseigner un dossier et nom de fichier.
c.Sélectionner enregistrer. Un nouveau fichier RDK sera généré (fichier station RoboDK).
Récupérer les modifications de la station à tout moment en ouvrant le fichier RDK (double-cliquer sur le fichier sous Windows).
En résumé, il est important de vérifier les points suivants :
1.Les outils de calibration sont nommés “CalibTool id” et l’id est un nombre démarrant à 1 (s’il y a 3 outils de calibration, vous devez avoir “CalibTool 1”, “CalibTool 2” et “CalibTool 3”.
2.Le repère de référence « Référence des mesures » est directement relié au repère de référence de la base du robot
Pour l’instant, utiliser une estimation de ce repère (valeur approximative).
3.La référence Tracker est directement liée à la référence Mesures. La référence du pointeur doit être une position estimée du dispositif de mesure du pointeur par rapport à la référence des mesures.
4.Le projet « Étalonnage du robot » est présent dans la station et toutes les mesures que vous prévoyez de prendre sont exemptes de collision et visibles par le tracker (double-cliquer sur les paramètres d’étalonnage et sélectionner afficher pour chaque groupe de mesures).
5.Vérifier automatiquement les collisions, utiliser la balise de nom « collision » dans chaque objet que vous voulez utiliser pour vérifier les collisions. Il est recommandé d’utiliser un outil d’environ 25 % plus grand que l’outil étalonné pour éviter les collisions en toute sécurité.
Générer des cibles de calibration
Quatre ensembles de mesures sont nécessaires pour réussir l’étalonnage du robot :
1.Base setup : six mesures (ou plus) des axes mobiles 1 et 2 sont nécessaires pour placer la référence d’étalonnage par rapport au robot. Sélectionner Show dans la fenêtre des paramètres d’étalonnage et le robot se déplacera le long de la séquence.
2.Tool setup : sept mesures ou plus sont nécessaires pour étalonner la bride de l’outil et les cibles de l’outil (axes mobiles 5 et 6). Sélectionner Show et le robot se déplacera le long de la séquence.
3.Calibration measurements : 60 mesures ou plus sont nécessaires pour étalonner le robot. Ces mesures peuvent être placées au hasard dans l’espace de travail du robot et être exemptes de collision avec les objets environnants.
4.Validation measurements (optionnelle) : autant de mesures que vous le souhaitez peuvent être utilisées pour valider la précision du robot. Ces mesures servent uniquement à valider la précision du robot et non à l’étalonner.
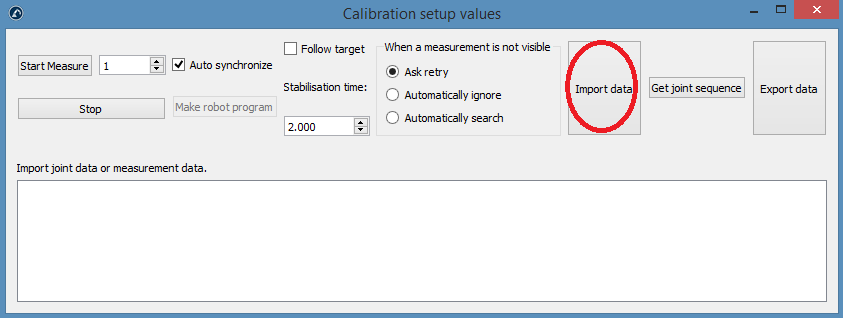
Les deux premiers ensembles de mesures sont générés automatiquement par RoboDK. Sélectionner Show et le robot suivra la séquence (comme indiqué dans les images suivantes). Si la séquence doit être modifiée, sélectionner Mesurer et exporter les mesures d’étalonnage sous forme de fichier CSV en sélectionnant Exporter les données. Ce fichier peut être modifié à l’aide d’une feuille Excel et réimporté en cliquant sur Importer les données.
Les deux derniers ensembles de mesures (étalonnage et validation) peuvent être générés à l’aide du script macro intitulé 
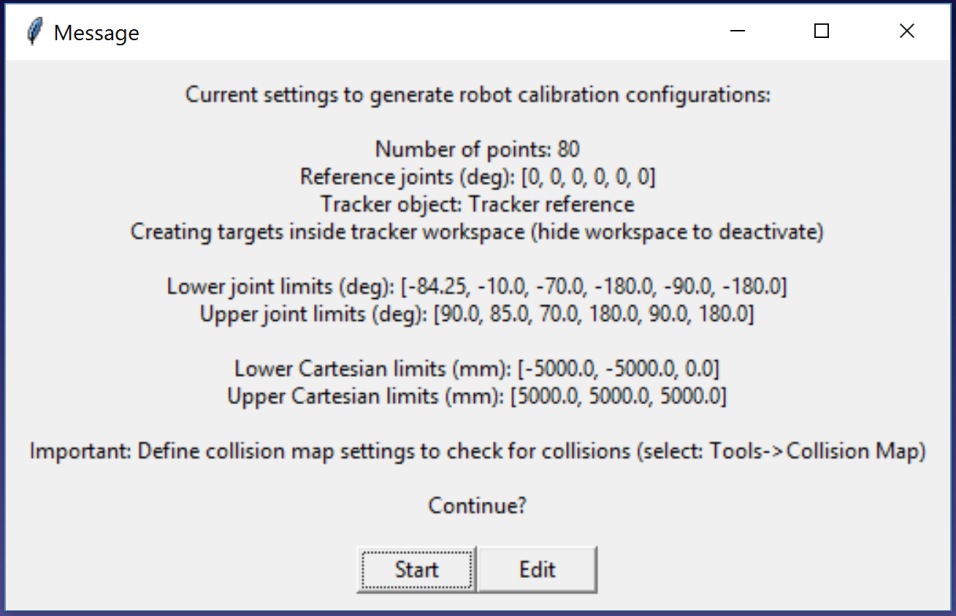
●Nombre de mesures : le nombre de mesures à générer. Par défaut, 80 mesures sont utilisées car un minimum de 60 mesures est requis pour l’étalonnage du robot.
●Position de référence : La position de référence doit être une position du robot où l’outil fait face au tracker avec des cibles visibles.
●Limites des Joints : Les limites inférieures et supérieures des articulations doivent être fournies.
●Limites cartésiennes : Nous pouvons définir des limites cartésiennes (valeurs X, Y, Z) par rapport au repère de référence du robot.
Le script génère automatiquement des mesures lorsque l’outil fait face au tracker et également respecte les contraintes articulaires et cartésiennes. Une rotation de +/-180 deg autour de l’outil est autorisée autour de la direction qui fait face au tracker à la position de référence. De plus, la séquence des mouvements des joints/articulations est exempte de collision et à l’intérieur de l’espace de travail de mesure (si l’espace de travail est défini pour être visible). L’image suivante montre le résumé qui est présenté à l’utilisateur avant le démarrage de la séquence automatique. La fin de la séquence peut prendre jusqu’à 5 minutes
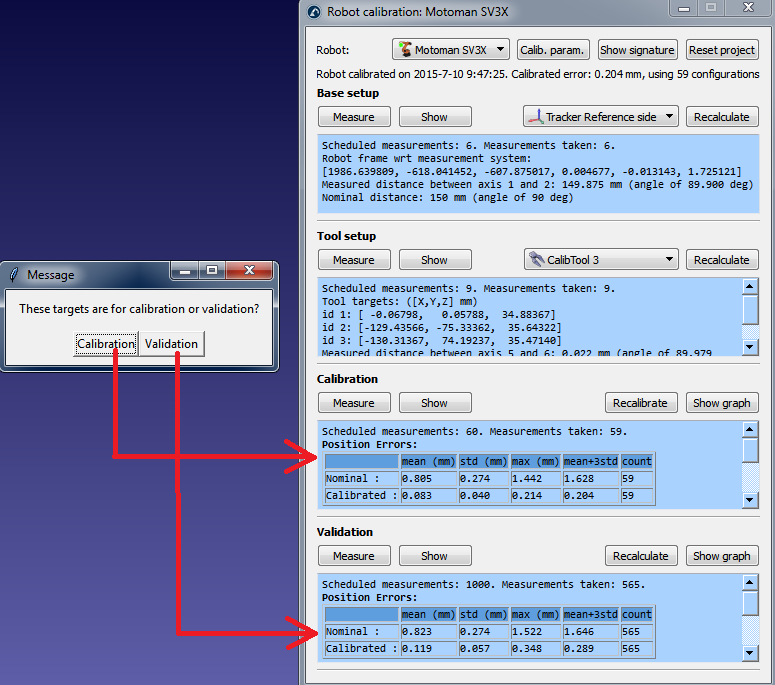
Un nouveau message apparaît une fois l’algorithme terminé. Sélectionner Calibration pour utiliser les 60 mesures pour l’étalonnage du robot. Vous pouvez ré-exécuter le même script pour générer un autre ensemble de mesures à valider. Cette étape est facultative, mais 60 mesures ou plus sont recommandées à des fins de validation.
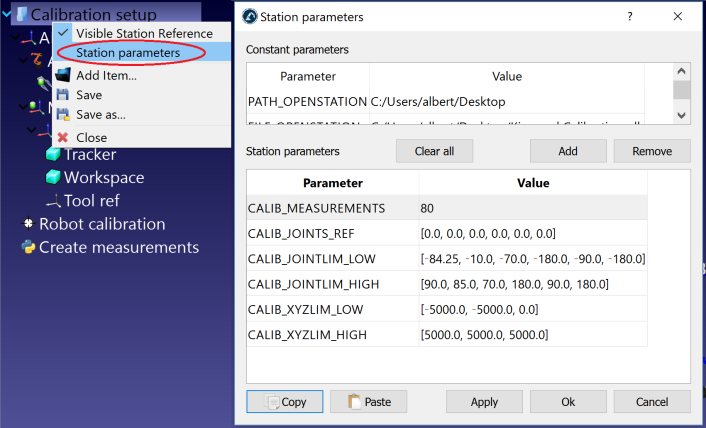
Si vous le souhaitez, il est possible de modifier le script en faisant un clic droit sur le script Create measurements et en sélectionnant Modifier le script, puis modifier les paramètres supplémentaires de l’algorithme. Le script enregistre automatiquement les données renseignées par l’utilisateur comme paramètres de la station. Vous pouvez afficher, modifier ou supprimer ces paramètres avec un clic droit sur la station et en sélectionnant les paramètres de la station, comme indiqué dans l’image suivante.
Enfin, il est également possible d’importer des configurations sélectionnées manuellement en sélectionnant Importer des données (dans le menu Mesure). Vous pouvez importer un fichier CSV ou TXT comme une matrice Nx6, où N est le nombre de configurations.