Configuration de l’étalonnage du Robot
Il est nécessaire de connecter le tracker laser et le robot à l’ordinateur pour automatiser la procédure de prise de mesures. Il est également recommandé de mesurer un repère de référence à travers trois points si vous déplacez le tracker laser (cette étape est obligatoire si vous voulez récupérer la position de repos pour l’axe 1, voir l’annexe II pour plus d’informations).
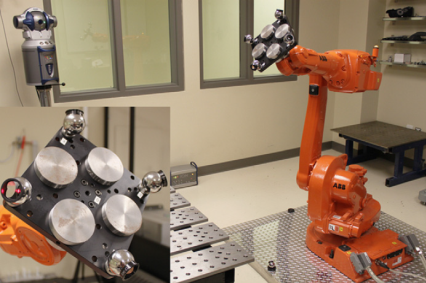
Il est nécessaire de fixer au moins une cible SMR (trois cibles ou plus sont recommandées), comme indiqué dans les images suivantes. Il est également pratique d’utiliser 3 nids comme repère de référence si le tracker laser doit être déplacé.
Les sous-sections suivantes doivent être exécutées de façon séquentielle pour être prêts à commencer à prendre des mesures.
Connect to the tracker
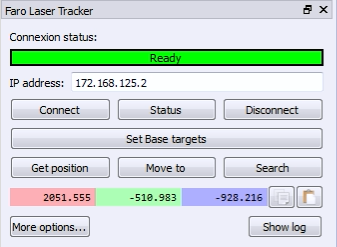
L’adresse IP du tracker laser est nécessaire pour définir correctement la communication dans RoboDK. Suivre les étapes ci-dessous pour vérifier la communication avec le tracker laser :
a.Sélectionner le menu « Connect➔Connect laser tracker ». Une nouvelle fenêtre doit s’ouvrir.
b.Renseigner l’adresse IP du tracker laser.
c.Cliquer sur le bouton “Connect”.
Si la connexion est réussie, vous voyez un message vert écrit “Ready”. La fenêtre peut être fermée et la connexion reste active.
Connexion au robot
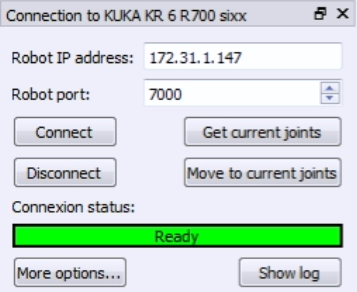
L’adresse IP du robot (ou le numéro de port COM pour les connexions RS232) est nécessaire pour régler correctement la communication avec RoboDK. Suivre ces étapes pour vérifier la communication avec le robot :
1.Sélectionner Connecter➔Connecter robot. Une nouvelle fenêtre va apparaitre.
2.Définir l’adresse IP et le port du robot (ou le port COM si la connexion est par RS232).
3.Cliquer sur le bouton Connect.
4.Reporte-vous à l’annexe si des problèmes surviennent.
Si la connexion est réussie, vous voyez un message vert affichant Ready. La position du robot virtuel correspond exactement à la position du robot réel en sélectionnant Get current joints. Sinon, sélectionner Move to current joints pour déplacer le robot à la position actuelle définie dans le simulateur. La fenêtre peut être fermée et la connexion reste active
Measuring the reference targets
Il est recommandé de mesurer un repère de référence d’étalonnage, fixé à la base du robot. Cela est utile si nous voulons déplacer le tracker pendant l’étalonnage ou comparer deux étalonnages de robot. Le repère de référence de l’étalonnage doit être défini par 3 points tangibles.
Sauter cette étape si vous n’allez pas déplacer le pointeur par rapport au robot ou si vous n’avez pas besoin de récupérer la position de repos pour l’axe 1. Dans ce cas, la référence du tracker laser sera utilisée.
Suivre ces étapes chaque fois que le tracker laser change de position :
1.Sélectionner Connect➔Connect laser tracker.
2.Définir l’adresse IP du tracker laser et sélectionner Connect (uniquement si le tracker n’est pas connecté).
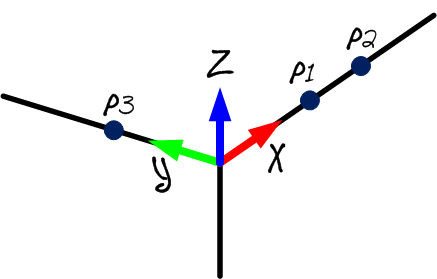
3.Définir la référence d’étalonnage et la référence du tracker comme montré dans l’image. La référence d’étalonnage est également connue sous le nom de « référence des mesures ».
4.Sélectionner Set Base targets.
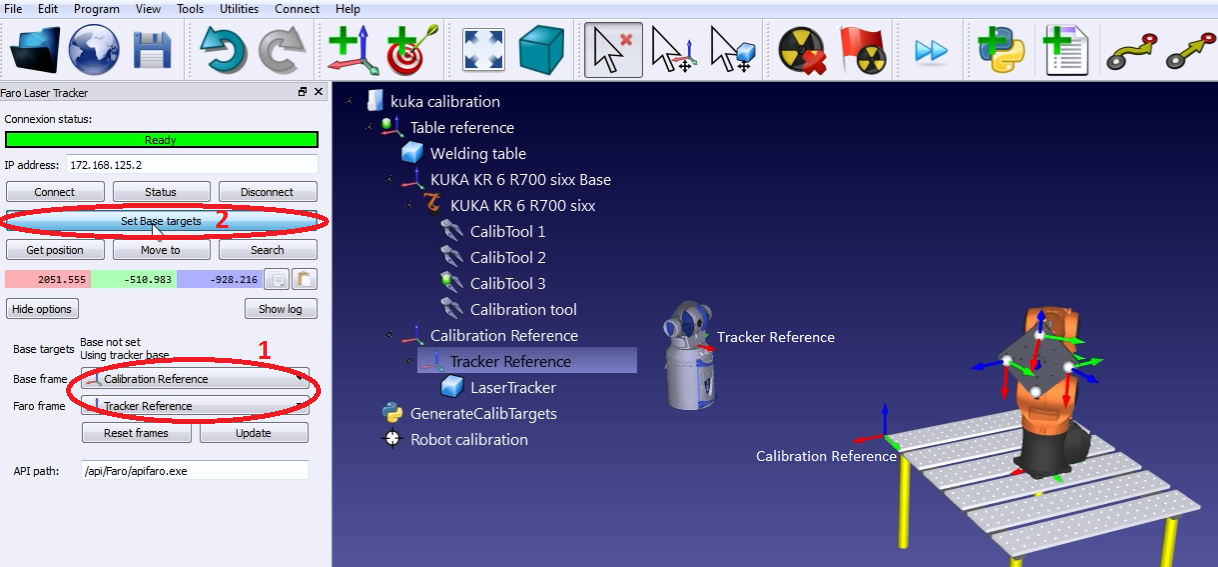
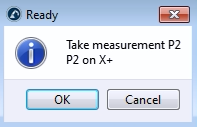
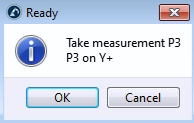
RoboDK guidera l’utilisateur avec les menus affichés dans l’image suivante. La position du tracker laser sera automatiquement mise à jour par rapport à la référence d’étalonnage lorsque la procédure sera terminée.