Connexion au robot
L’adresse IP du robot (ou le numéro de port COM pour les connexions RS232) est nécessaire pour régler correctement la communication avec RoboDK. Suivre ces étapes pour vérifier la communication avec le robot :
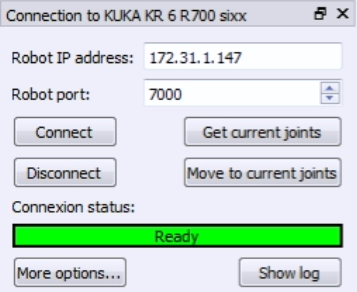
1.Sélectionner Connecter➔Connecter robot. Une nouvelle fenêtre va apparaitre.
2.Définir l’adresse IP et le port du robot (ou le port COM si la connexion est par RS232).
3.Cliquer sur le bouton Connect.
4.Reporte-vous à l’annexe si des problèmes surviennent.
Si la connexion est réussie, vous voyez un message vert affichant Ready. La position du robot virtuel correspond exactement à la position du robot réel en sélectionnant Get current joints. Sinon, sélectionner Move to current joints pour déplacer le robot à la position actuelle définie dans le simulateur. La fenêtre peut être fermée et la connexion reste active