Générer des cibles de calibration
Quatre ensembles de mesures sont nécessaires pour réussir l’étalonnage du robot :
1.Base setup : six mesures (ou plus) des axes mobiles 1 et 2 sont nécessaires pour placer la référence d’étalonnage par rapport au robot. Sélectionner Show dans la fenêtre des paramètres d’étalonnage et le robot se déplacera le long de la séquence.
2.Tool setup : sept mesures ou plus sont nécessaires pour étalonner la bride de l’outil et les cibles de l’outil (axes mobiles 5 et 6). Sélectionner Show et le robot se déplacera le long de la séquence.
3.Calibration measurements : 60 mesures ou plus sont nécessaires pour étalonner le robot. Ces mesures peuvent être placées au hasard dans l’espace de travail du robot et être exemptes de collision avec les objets environnants.
4.Validation measurements (optionnelle) : autant de mesures que vous le souhaitez peuvent être utilisées pour valider la précision du robot. Ces mesures servent uniquement à valider la précision du robot et non à l’étalonner.
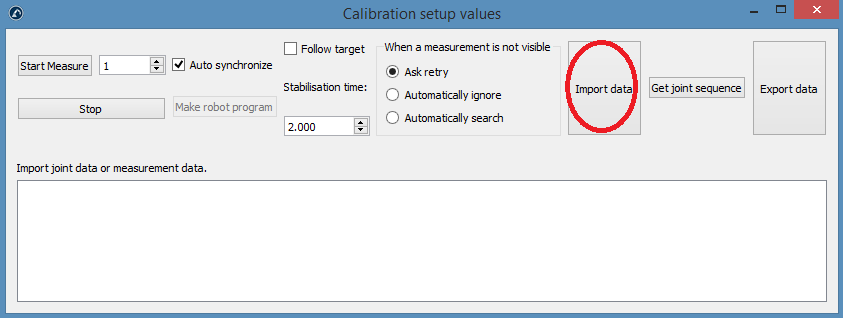
Les deux premiers ensembles de mesures sont générés automatiquement par RoboDK. Sélectionner Show et le robot suivra la séquence (comme indiqué dans les images suivantes). Si la séquence doit être modifiée, sélectionner Mesurer et exporter les mesures d’étalonnage sous forme de fichier CSV en sélectionnant Exporter les données. Ce fichier peut être modifié à l’aide d’une feuille Excel et réimporté en cliquant sur Importer les données.
Les deux derniers ensembles de mesures (étalonnage et validation) peuvent être générés à l’aide du script macro intitulé 
●Nombre de mesures : le nombre de mesures à générer. Par défaut, 80 mesures sont utilisées car un minimum de 60 mesures est requis pour l’étalonnage du robot.
●Position de référence : La position de référence doit être une position du robot où l’outil fait face au tracker avec des cibles visibles.
●Limites des Joints : Les limites inférieures et supérieures des articulations doivent être fournies.
●Limites cartésiennes : Nous pouvons définir des limites cartésiennes (valeurs X, Y, Z) par rapport au repère de référence du robot.
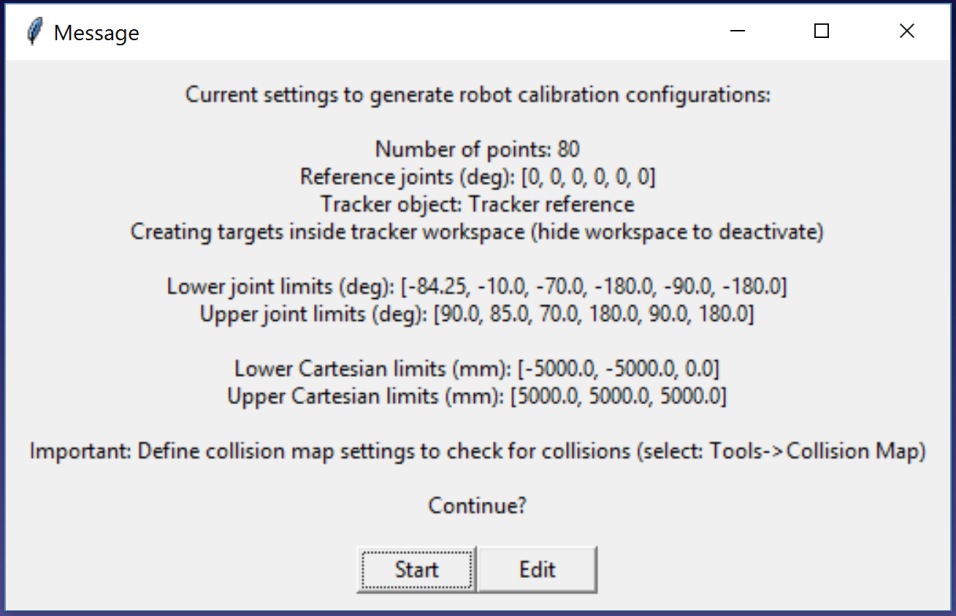
Le script génère automatiquement des mesures lorsque l’outil fait face au tracker et également respecte les contraintes articulaires et cartésiennes. Une rotation de +/-180 deg autour de l’outil est autorisée autour de la direction qui fait face au tracker à la position de référence. De plus, la séquence des mouvements des joints/articulations est exempte de collision et à l’intérieur de l’espace de travail de mesure (si l’espace de travail est défini pour être visible). L’image suivante montre le résumé qui est présenté à l’utilisateur avant le démarrage de la séquence automatique. La fin de la séquence peut prendre jusqu’à 5 minutes
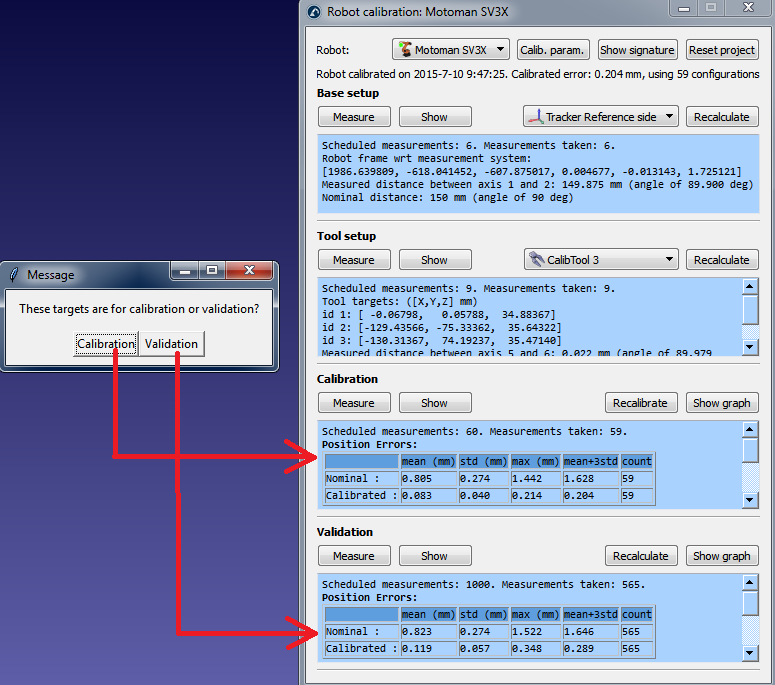
Un nouveau message apparaît une fois l’algorithme terminé. Sélectionner Calibration pour utiliser les 60 mesures pour l’étalonnage du robot. Vous pouvez ré-exécuter le même script pour générer un autre ensemble de mesures à valider. Cette étape est facultative, mais 60 mesures ou plus sont recommandées à des fins de validation.
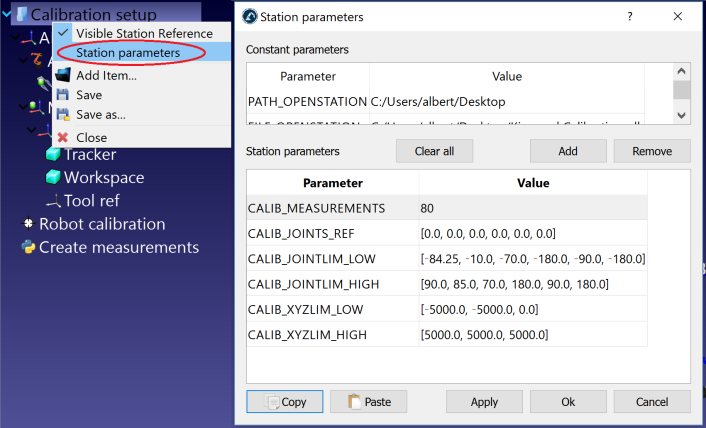
Si vous le souhaitez, il est possible de modifier le script en faisant un clic droit sur le script Create measurements et en sélectionnant Modifier le script, puis modifier les paramètres supplémentaires de l’algorithme. Le script enregistre automatiquement les données renseignées par l’utilisateur comme paramètres de la station. Vous pouvez afficher, modifier ou supprimer ces paramètres avec un clic droit sur la station et en sélectionnant les paramètres de la station, comme indiqué dans l’image suivante.
Enfin, il est également possible d’importer des configurations sélectionnées manuellement en sélectionnant Importer des données (dans le menu Mesure). Vous pouvez importer un fichier CSV ou TXT comme une matrice Nx6, où N est le nombre de configurations.