Master du Robot
Une fois que le robot a été calibré, vous avez généralement besoin de RoboDK pour filtrer les programmes. Une licence RoboDK est nécessaire (une licence OLP de base est suffisante pour générer des programmes de robot précis une fois que le robot a été calibré). Filtrer un programme signifie que les cibles d’un programme sont modifiées/optimisées pour améliorer la précision du robot, en tenant compte de tous les paramètres d’étalonnage (environ 30 paramètres).
Il est possible aussi d’étalonner uniquement les décalages de joint/articulation et les repères de base et d’outil (4 paramètres de décalage de joint plus 6 paramètres pour le repère de base, plus 6 paramètres pour le repère d’outil). L’étalonnage ne sera pas aussi précis que si vous utilisiez l’étalonnage complet par défaut, mais il pourrait permettre de saisir certains paramètres dans le contrôleur du robot et ne pas dépendre de RoboDK pour générer des programmes robot.
Pour obtenir l’étalonnage uniquement pour les décalages de joint/articulation, sélectionner Calib. Param. puis le bouton Mastering (dans le menu d’étalonnage du robot).
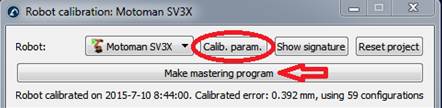

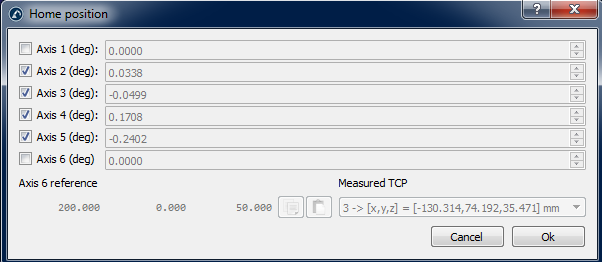
Après avoir sélectionné Make mastering program, une nouvelle fenêtre apparaîtra. Dans cette fenêtre, sélectionner les axes que vous voulez pour définir la nouvelle position de départ.
Le bouton Make mastering program apparaîtra dans la fenêtre d’étalonnage du robot. Sélectionner ce bouton pour générer un programme qui amènera le robot à la nouvelle position de départ. Transférer-le au robot et exécuter-le. La nouvelle position de départ peut être enregistrée.
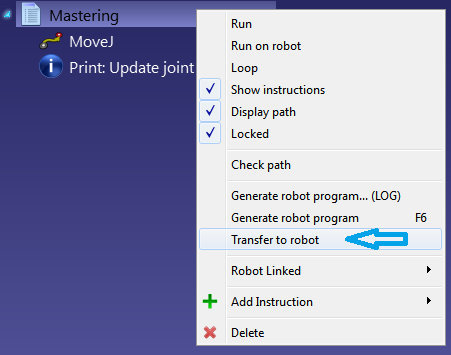
Si le robot et le PC sont connectés, faire un clic droit sur le programme et sélectionner Envoyer le programme au robot pour envoyer automatiquement le programme au robot. Sinon, sélectionner Générer programme robot pour voir de nouvelles valeurs pour la position de départ.
Ci-dessous un exemple vous permettant de mettre à jour la position d’origine d’un robot Motoman.
Dans un premier temps exécuter le programme maître (“MASTERING”) pour apporter le robot dans sa position d’origine.
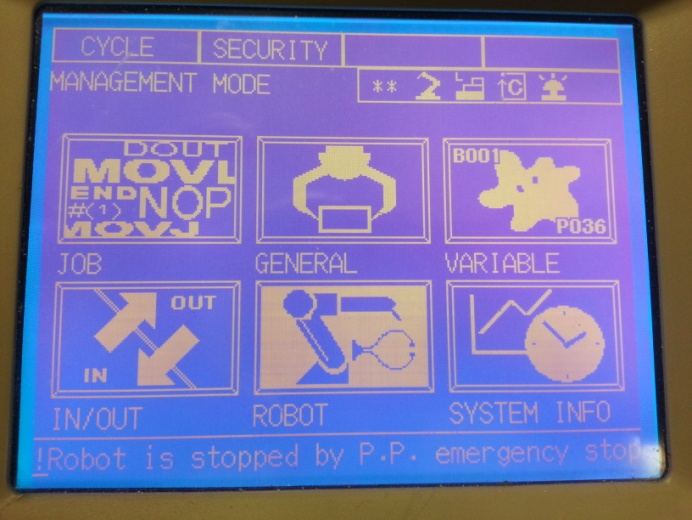
Une fois le programme dans le contrôleur, se connecter au mode “Management” (le mot de passe pour les robots Motoman est normalement 99999999) et vous mettre en mode Teach. Les images suivantes montrent les étapes à suivre.


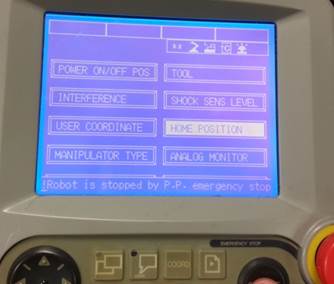
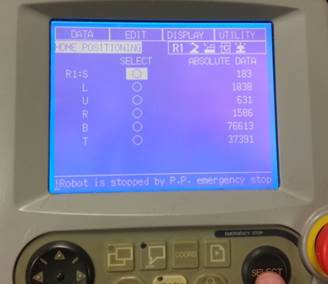

Bien s’assurer de tains de mettre à jour la position d’origine pour tous les joints du robot.
Une fois la position d’origine définie, supprimer le programme qui a positionné le robot dans sa position d’origine.