Reference de l’Axe 6
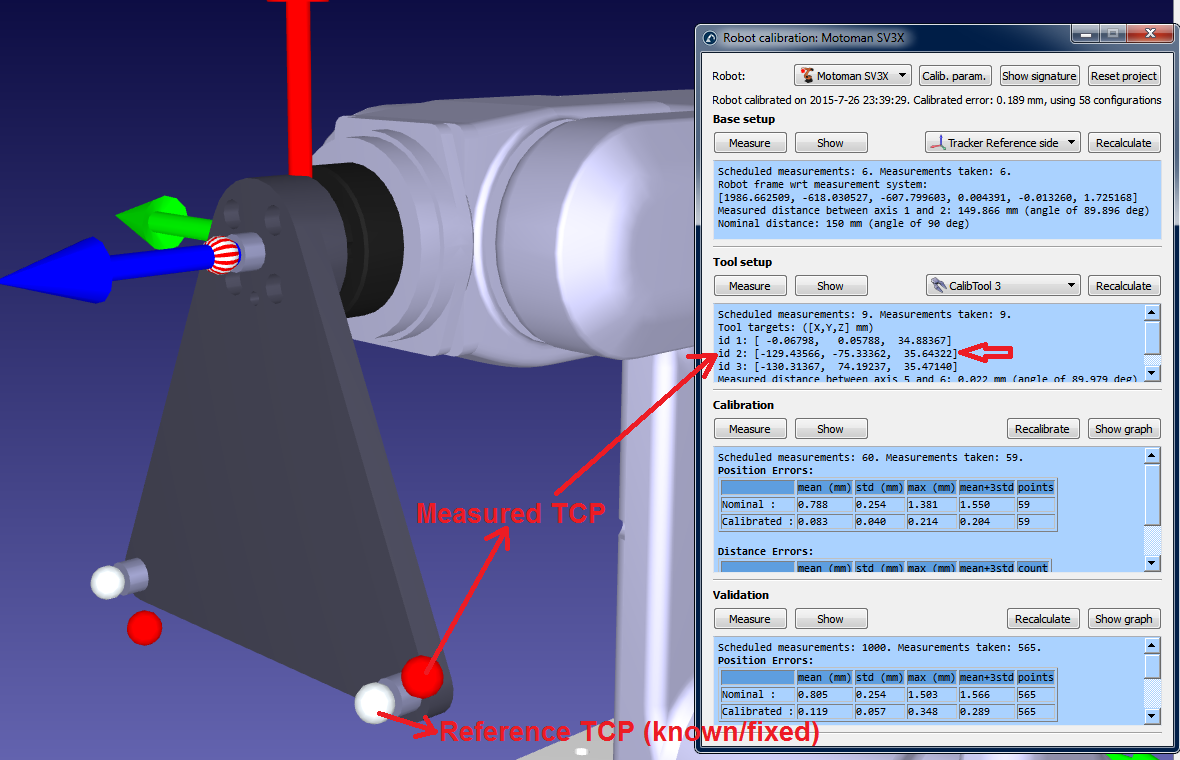
Utiliser une cible de référence pour régler correctement la position d’origine de l’axe 6. Le décalage de l’angle sera une rotation autour de l’axe Z de la bride, nécessaire pour adapter au mieux le TCP mesuré (X, Y, Z) à la référence TCP connue. Le TCP mesuré (voir l’image suivante) est l’un des TCP qui a été mesuré à l’étape deux de la procédure d’étalonnage. La référence TCP est une référence connue qui correspond à l’un des TCP de l’outil d’étalonnage utilisé.
Idéalement, le TCP de référence doit être mesuré par le CMM par rapport à la bride de l’outil (une réplique de la bride de l’outil robot serait préférable). Il est possible aussi d’utiliser un nouveau robot pour mesurer (étape deux de la procédure d’étalonnage) le TCP pour la première fois et utiliser un TCP mesuré comme référence. Il est important d’utiliser une goupille de goujon et/ou une bride d’outil appropriée pour s’assurer que l’effecteur est toujours placé à la même position.