Repère de reference et repère d’outil
RoboDK fournit quelques utilitaires pour étalonner les repères de référence et les repères d’outils. Ces outils sont accessibles dans Utilitaires ➔ Définir Outil (TCP) et Utilitaires ➔ Définir Repère (User frame).
Pour calibrer un repère de référence ou un repère d’outils (également connu sous le nom de repère utilisateur et repère TCP), vous avez besoin de configurations robot touchant 3 points ou plus. Ces configurations peuvent être soit des valeurs joint ou des coordonnées cartésiennes (avec des données d’orientation dans certains cas). Il est recommandé d’utiliser les valeurs de joint au lieu des coordonnées cartésiennes car il est plus facile de vérifier la configuration réelle du robot dans RoboDK (en copiant les valeurs d’articulations du robot sur l’écran principal de RoboDK).
Tool calibration
Sélectionner Utilitaires➔Definir Outil (TCP) pour calibrer le TCP en utilisant RoboDK. Il est possible d’utiliser autant de points que vous le souhaitez, en utilisant différentes orientations. Plus il y a de points et de changements d’orientation, et mieux ce sera pour que vous obteniez une meilleure estimation du TCP ainsi qu’une bonne estimation de l’erreur TCP.
Les 2 options suivantes sont disponibles pour calibrer un TCP :
●En touchant un point fixe avec le TCP avec différentes orientations.
●En touchant un plan avec le TCP (comme une sonde tactile).
Il est recommandé d’étalonner en touchant une référence plane pour étalonner une sonde tactile ou une broche. Cette méthode est plus stable contre les erreurs utilisateur.
Si le TCP est sphérique, le centre de la sphère est calculé comme le nouveau TCP (il n’est pas nécessaire de définir le diamètre de la sphère).
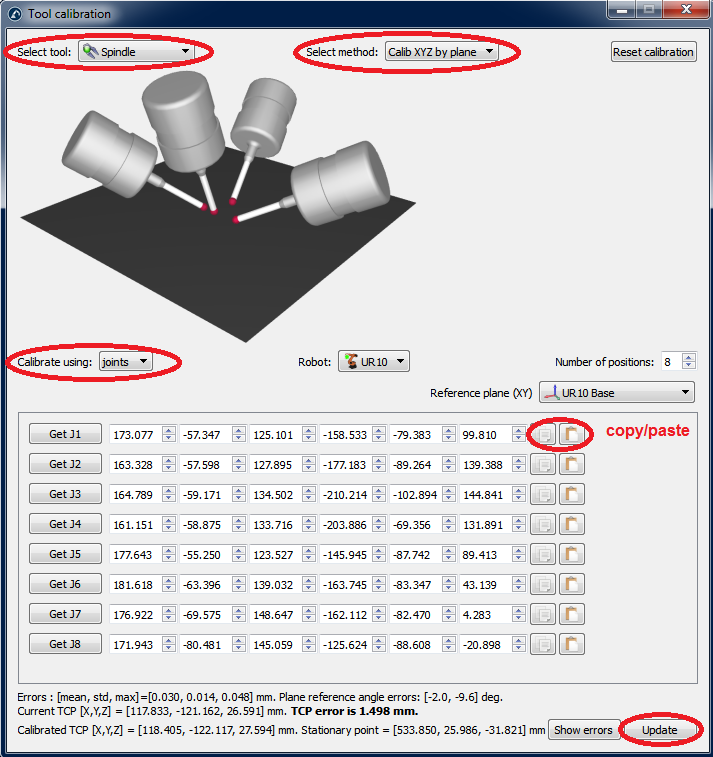
Les étapes suivantes doivent être suivies pour étalonner le TCP avec un plan (tel que le montre l’image) :
1.Sélectionner l’outil ayant besoin d’être calibré.
2.Sélectionner la méthode de calibration ➔ ”Calib XYZ by plane”.
3.Sélectionner Etalonner en utilisant “joints”.
4.Sélectionner le robot en cours d’utilisation.
5.Sélectionner le nombre de poses qui seront nécessaire pour calibrer le TCP (il est recommandé d’utiliser au moins 8 poses).
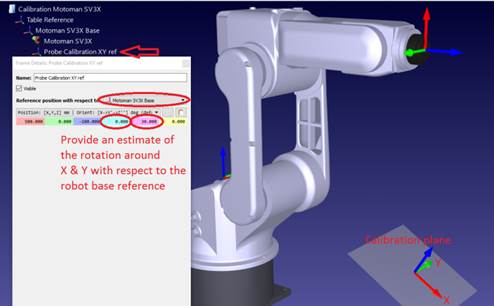
6.Sélectionner une estimation du plan de référence. Si le plan de référence n’est pas parallèle au plan robot XY (à partir de la référence du robot), ajouter une estimation de ce plan de référence dans une plage de ±20 degrés. La position de ce plan n’est pas importante, seulement l’orientation.
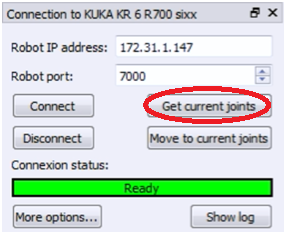
7.Commencer à remplir le tableau de valeurs des joints. Il est possible de le remplir manuellement ou en faisant des copier-coller avec les boutons (comme le montre l’image). Vous pouvez également utiliser le bouton « Get Jx » pour obtenir les valeurs de joint actuelles du robot dans le simulateur. Si vous obtenez les valeurs des joints/articulations d’un robot connecté, sélectionner « Get current joints » dans le menu de connexion du robot (voir l’image ci-jointe ou l’annexe pour plus d’informations sur la connexion d’un robot avec RobodDK). Il est fortement recommandé de conserver une copie séparée des joints utilisés pour l’étalonnage (comme un fichier texte, par exemple).
8.Une fois le tableau rempli, vous verrez les nouvelles valeurs TCP (X, Y, Z) comme « TCP étalonné », au bas de la fenêtre. Sélectionner « Mettre à jour » et le nouveau TCP sera mis à jour dans la station RoboDK. L’orientation de la sonde ne peut pas être trouvée en utilisant cette méthode.
9.Sélectionner « Show errors » et vous verrez l’erreur de chaque pose par rapport au TCP calculé (qui est la moyenne de toutes les poses). Vous pouvez supprimer une pose si elle a une erreur plus importante que les autres.
10.Mettre à jour manuellement les valeurs dans le contrôleur du robot (X, Y, Z uniquement). Si le TCP est utilisé dans un programme généré par RoboDK, il n’est pas nécessaire de mettre à jour les valeurs dans le contrôleur de robot.
11.
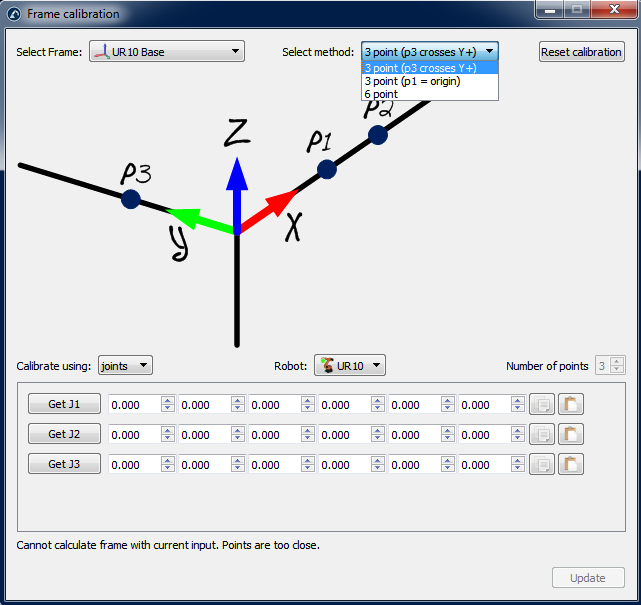
Calibration du repère de référence
Sélectionner Utilitaires➔Définir repère (user frame) pour étalonner un repère. Il est possible de définir un repère en utilisant différentes méthodes. Dans l’exemple du logiciel, un repère de référence est défini par trois points : les points 1 et 2 définissent la direction de l’axe des X et le point 3 définit l’axe des Y positifs.