Résultats
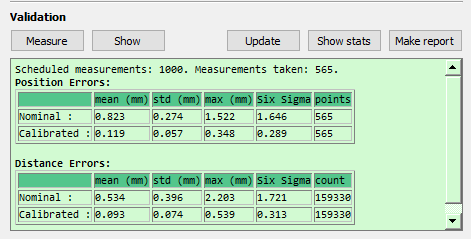
Une fois l’étalonnage terminé, analyser l’amélioration de la précision en lisant les statistiques fournies par RoboDK. Pour afficher ces statistiques, ouvrir la fenêtre d’étalonnage du robot (double-cliquer sur l’icône Étalonnage du robot). La fenêtre de résumé de la section de validation affiche les erreurs avant l’étalonnage (cinématique nominale) et après l’étalonnage (cinématique étalonnée). Deux tableaux sont fournis, l’un montre les statistiques concernant les erreurs de position et l’autre montre les erreurs de distance :
●Erreurs de position : L’erreur de position est la précision que le robot peut atteindre un point par rapport à un repère de référence.
●Erreurs de distance : L’erreur de distance est obtenue en mesurant l’erreur de distance de paires de points. La distance entre deux points observés par le robot (obtenue à l’aide de la cinématique étalonnée) est comparée à la distance observée par le système de mesure (mesurée physiquement). Toutes les combinaisons sont prises en compte. Si vous avez pris 315 mesures, vous aurez 315x315/2= 49455 valeurs d’erreur de distance.
Les statistiques fournies sont l’erreur moyenne, l’écart-type (std) et l’erreur maximale. Il est également fourni la moyenne plus trois fois l’écart-type, qui correspond à l’erreur attendue pour 99,98% de toutes les mesures (si l’on tient compte du fait que les erreurs suivent une distribution normale).
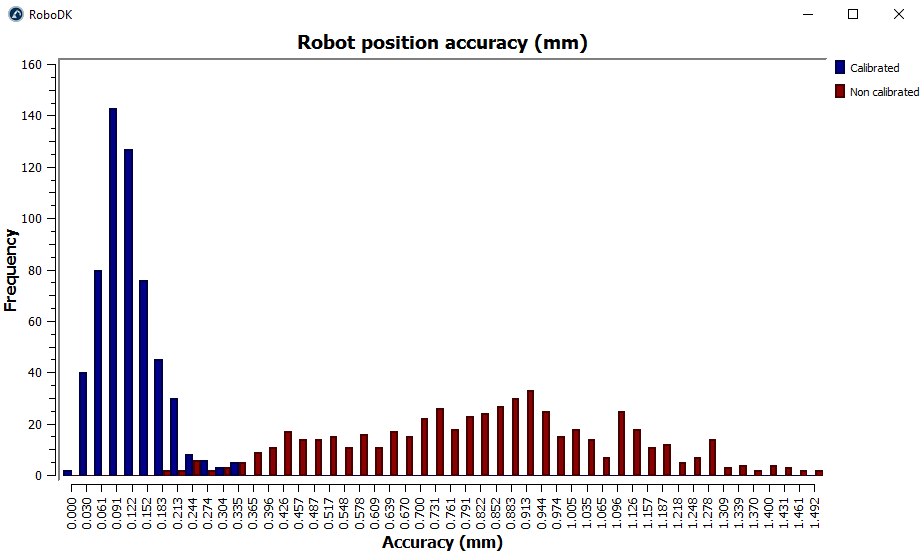
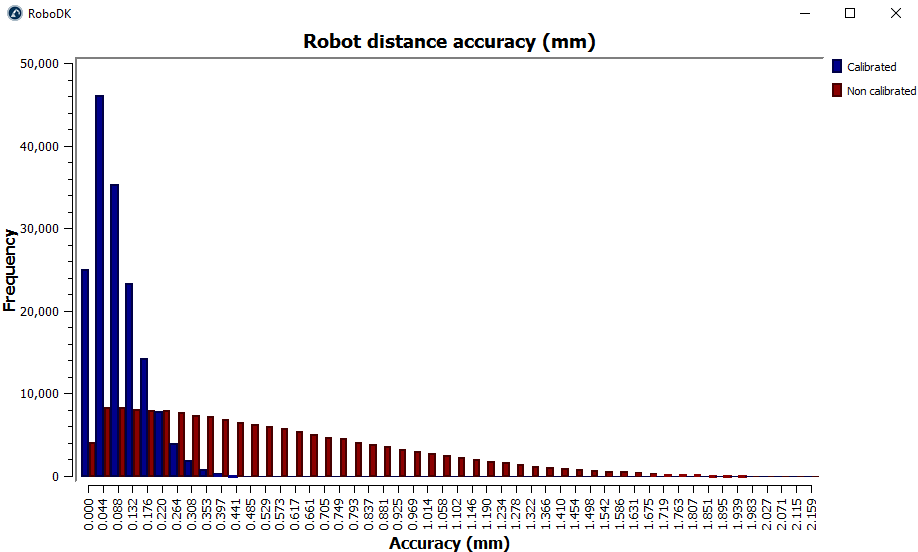
Sélectionner Show stats pour pouvoir afficher deux histogrammes. Ils montrent la distribution des erreurs avant et après l’étalonnage, un histogramme pour la précision de la position et l’autre pour la précision de la distance. Les images suivantes correspondent aux 315 mesures de validation utilisées dans cet exemple.
Enfin, sélectionner « Make report » et un rapport PDF contenant l’information présentée dans cette section sera généré.