Comment utiliser les drivers Robot
Suivre ces étapes pour utiliser les pilotes de robot avec RoboDK :
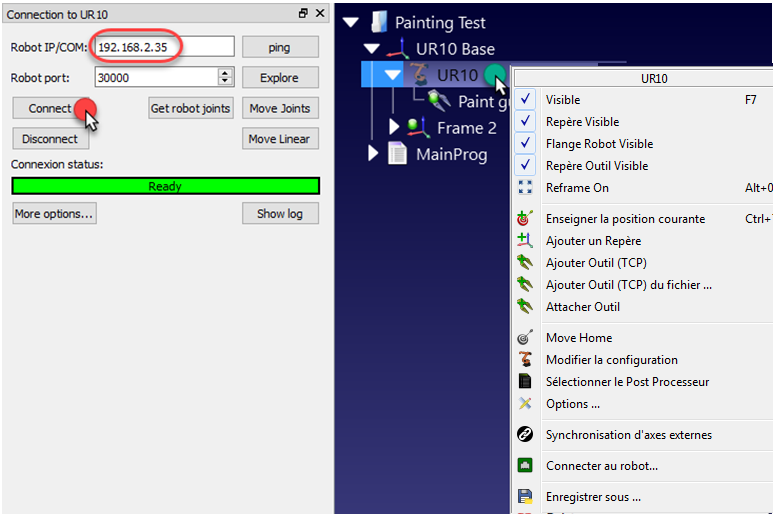
1.Faire un Clic droit sur un robot
2.Sélectionner 
3.Entrer l’adresse IP du robot
4.Sélectionner Connecter
Un message vert affichant Ready apparaîtra si la connexion a réussi, comme le montre l’image suivante.
Utilisation du GUI
Un programme de robot qui a été créé à l’aide de l’interface utilisateur graphique (GUI) peut être exécuté sur le robot en suivant les étapes suivantes :
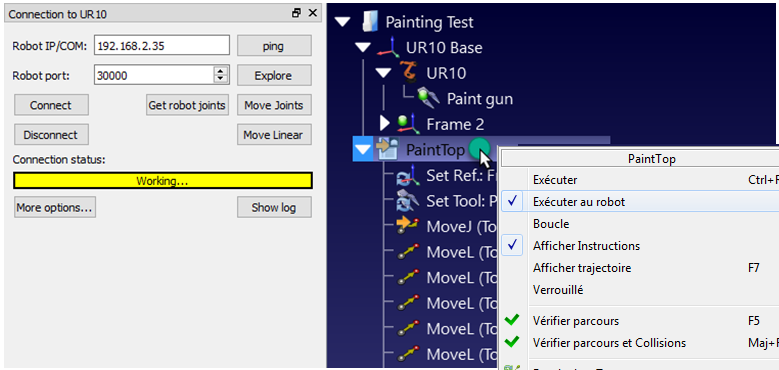
1.Faire un clic droit sur 
2.Sélectionner l’option Exécuter au robot
3.Double-cliquer le programme pour le démarrer
Le programme devrait démarrer sur le vrai robot et le simulateur suivra les mouvements du robot. L’état de connexion affichera Working… en jaune lorsque le robot est occupé.
Utilisation de l’API
Il est possible de contrôler le mouvement d’un robot à partir de l’API RoboDK, par exemple, pour programmer un robot à partir d’un programme Python ou d’une application C#.
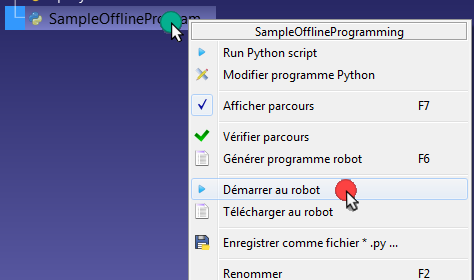
L’option Run on robot est gérée automatiquement lorsqu’un programme Python est exécuté à partir de RoboDK. Suivre ces étapes pour exécuter un programme Python sur le robot :
1.Faire un clic droit un programme 
2.Sélectionner 
Le programme devrait commencer à fonctionner sur le robot et l’état de connexion du robot sera mis à jour en conséquence.
Si le programme est exécuté en dehors de l’interface graphique de RoboDK (à des fins de débogage, ou si nous utilisons l’API RoboDK pour C# par exemple), nous pouvons définir le Runmode en utilisant RDK.setRunModeà RUNMODE_RUN_ROBOT. Cela forcera le programme à fonctionner sur le robot. Il est également possible d’établir la connexion à l’aide de robot.Connect().
Le code suivant montre un bref exemple pour établir une connexion avec le robot directement à partir de l’API :
# Start the RoboDK API
RDK = Robolink()
robot = RDK.Item('',ITEM_TYPE_ROBOT)
# Connect to the robot using default connetion parameters
success = robot.Connect()
status, status_msg = robot.ConnectedState()
if status != ROBOTCOM_READY:
# Stop if the connection did not succeed
raise Exception("Failed to connect: " + status_msg)
# Set to run the robot commands on the robot
RDK.setRunMode(RUNMODE_RUN_ROBOT)
# Note : This is set automatically if we use
# robot.Connect() through the API
# Move the robot:
robot.MoveJ([10,20,30,40,50,60])
prog = RDK.Item('MainProgram', ITEM_TYPE_PROGRAM)
prog.setRunType(PROGRAM_RUN_ON_ROBOT) # Set the run on robot option
# Set to PROGRAM_RUN_ON_SIMULATOR to run on the simulator only
prog.RunProgram()
while prog.Busy() == 1:
pause(0.1)
print("Program done")