Customiser les Drivers Robot
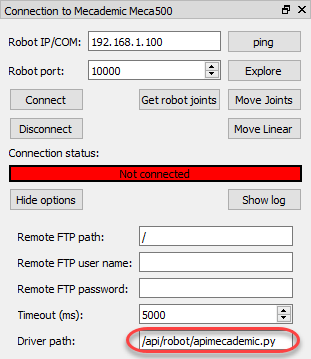
Les pilotes de robot sont situés dans le dossier /Robodk/api/Robot/ par défaut. RoboDK établit des liens vers un pilote spécifique dans les paramètres de connexion du robot :
1.Faire un clic droit sur un robot
2.Sélectionner 
3.Sélectionner Plus d’options…
4.Trouver ou entrer le chemin du Driver dans la section Chemin du Driver
Un pilote de robot est une application de console autonome. Les pilotes de robot peuvent être développés en utilisant n’importe quelle plate-forme de programmation, par exemple, ils peuvent être un module Python (format PY) ou n’importe quel programme exécutable construit sous n’importe quel environnement de développement.
Le pilote de robot permet de communiquer avec un robot via la ligne de commande. Les mêmes commandes qui peuvent être exécutées manuellement sont également utilisés par RoboDK pour piloter le robot à partir du PC. Chaque pilote/driver de robot peut être exécuté en mode console pour le tester.
Un exemple de driver Python (apimecademic.py) avec son code source afin de contrôler un robot Mecademic est disponible dans C:/RoboDK/bin/robot/.
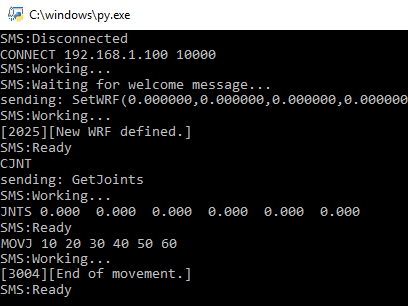
Double-cliquer sur le fichier apimecademic.py pour lancer le module en mode console (Python doit être installé). Le pilote attendra les nouvelles commandes. Par exemple, nous pouvons taper la commande suivante pour se connecter au robot en fournissant une adresse IP et un port de communication :
CONNECT 192.168.100.1 10000
Si la connexion réussit, vous voyer un message SMS:Ready. Ensuite, taper la commande suivante pour récupérer les Joints du robot en cours :
CJNT
Il est possible aussi de taper d’autres commandes comme MOVJ, MOVL ou SETTOOL pour déplacer le robot ou mettre à jour le TCP :
MOVJ 10 20 30 40 50 60
Certains robots permettent la surveillance/supervision de la position articulaire en temps réel. Dans ce cas, il est possible d’avoir un retour de position articulaire lorsque le robot se déplace en envoyant la commande JNTS_MOVING. Lorsque le pilote est exécuté à partir de RoboDK, le robot virtuel suivra le mouvement du robot réel en temps réel. Une nouvelle commande ne sera pas traitée tant que le message Ready/Prêt n’aura pas été envoyé.
L’interaction avec la console et la connexion au robot sont gérées par un module Python pour le pilote Mecademic. L’interaction avec la console doit être la même pour tous les robots, comme décrit dans cette section. Cependant, l’interaction avec chaque robot dépend du fabricant du robot, dans ce cas il faut se référer au manuel de programmation Meca 500 pour envoyer les commandes appropriées. Ces commandes permettent de déplacer et de surveiller le robot Meca 500.