Utilisation de l’API
Il est possible de contrôler le mouvement d’un robot à partir de l’API RoboDK, par exemple, pour programmer un robot à partir d’un programme Python ou d’une application C#.
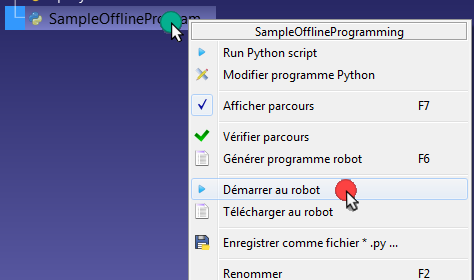
L’option Run on robot est gérée automatiquement lorsqu’un programme Python est exécuté à partir de RoboDK. Suivre ces étapes pour exécuter un programme Python sur le robot :
1.Faire un clic droit un programme 
2.Sélectionner 
Le programme devrait commencer à fonctionner sur le robot et l’état de connexion du robot sera mis à jour en conséquence.
Si le programme est exécuté en dehors de l’interface graphique de RoboDK (à des fins de débogage, ou si nous utilisons l’API RoboDK pour C# par exemple), nous pouvons définir le Runmode en utilisant RDK.setRunModeà RUNMODE_RUN_ROBOT. Cela forcera le programme à fonctionner sur le robot. Il est également possible d’établir la connexion à l’aide de robot.Connect().
Le code suivant montre un bref exemple pour établir une connexion avec le robot directement à partir de l’API :
# Start the RoboDK API
RDK = Robolink()
robot = RDK.Item('',ITEM_TYPE_ROBOT)
# Connect to the robot using default connetion parameters
success = robot.Connect()
status, status_msg = robot.ConnectedState()
if status != ROBOTCOM_READY:
# Stop if the connection did not succeed
raise Exception("Failed to connect: " + status_msg)
# Set to run the robot commands on the robot
RDK.setRunMode(RUNMODE_RUN_ROBOT)
# Note : This is set automatically if we use
# robot.Connect() through the API
# Move the robot:
robot.MoveJ([10,20,30,40,50,60])
prog = RDK.Item('MainProgram', ITEM_TYPE_PROGRAM)
prog.setRunType(PROGRAM_RUN_ON_ROBOT) # Set the run on robot option
# Set to PROGRAM_RUN_ON_SIMULATOR to run on the simulator only
prog.RunProgram()
while prog.Busy() == 1:
pause(0.1)
print("Program done")