Configuration préférée
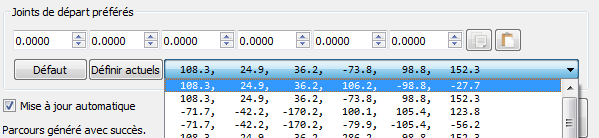
RoboDK sélectionne automatiquement la configuration de départ la plus proche des articulations de départ préférés (joints de départ préférés pour la position de démarrage). À partir de ce moment, le robot suivra les mouvements linéaires, de sorte que la configuration du robot ne change pas.
Un menu déroulant affichera toutes les solutions possibles pour démarrer le programme. Si nécessaire, sélectionner une configuration préférée et sélectionner Update pour recalculer le programme.