Optimisation de paramètres
Même avec une orientation privilégiée (préférée), le robot peut avoir une certaine liberté pour tourner autour de l’axe Z de l’outil. Cela permet au robot d’accomplir le programme en évitant les singularités et les contraintes d’axe. Par défaut, RoboDK permet à l’outil de pivoter jusqu’à +/-180 degrés autour de l’axe TCP par incréments de 20 degrés.
Il est recommandé de limiter cette rotation en fonction de l’application. Par exemple, il est possible d’entrer +/-90 degrés pour limiter de moitié la rotation autorisée.
Astuce : Sélectionner Montrer parcours approximé pour voir les points accessibles (en vert) et les points inaccessibles (en rouge). Les points d’accès peuvent être tournés par rapport au parcours outils préféré pour rendre les cibles accessibles par le robot.
Si certains points du parcours ne sont pas accessibles, il est recommandé de déplacer le repère ou d’être plus permissif avec la rotation de l’outil Z. Le repère peut être déplacé en maintenant la touche Alt enfoncée.
Note : Le parcours outils estimé s’affiche lorsque le repère ou le TCP sont modifiés si l’option de mise à jour automatique est cochée.
Astuce : De plus petites valeurs permettent une réorientation plus progressive de l’outil lorsqu’il traverse une singularité. Par contre, le calcul du parcours outils pourrait prendre plus de temps.
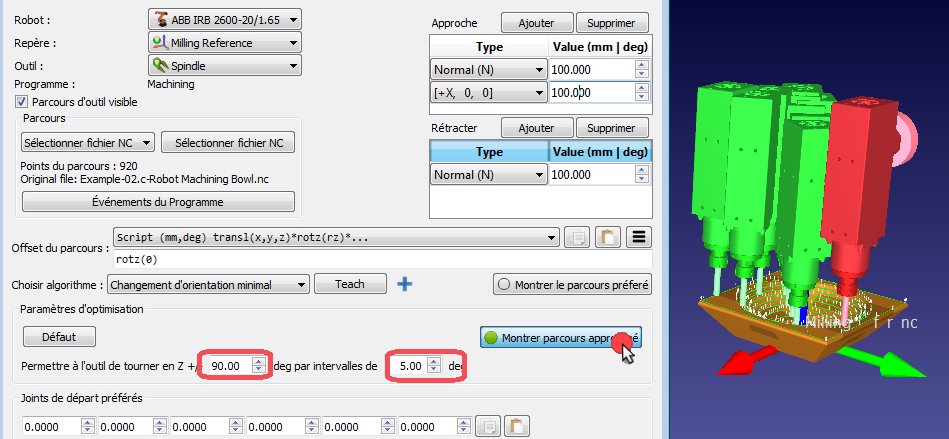
Note : Régler la rotation autorisée autour de Z à 0 degré pour contraindre complètement l’outil en fonction de l’orientation préférée.