Paramètres pour l’usinage
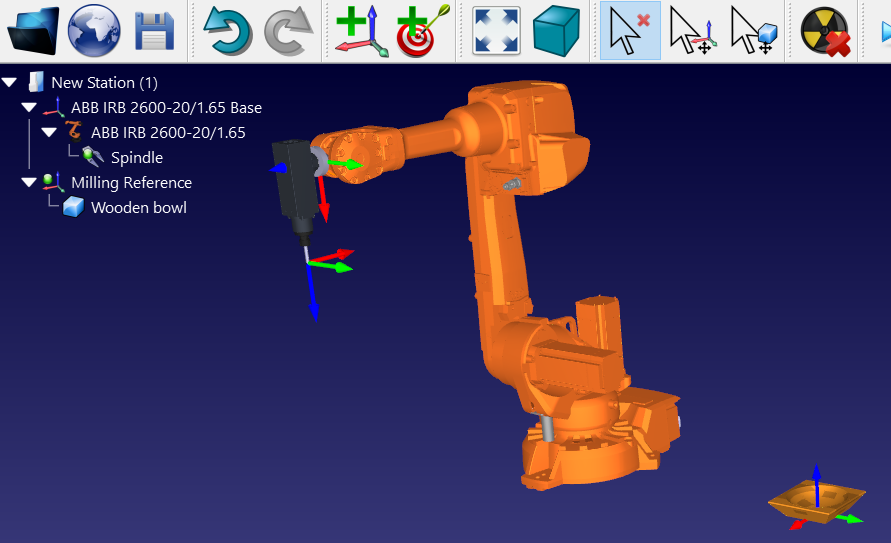
Cette section montre comment préparer une simple station RoboDK hors ligne pour l’usinage robot. Une station RoboDK contient tous les robots, outils, repères, objets et autres paramètres. Plus d’informations sur la construction d’une station RoboDK dans la section de démarrage.
Il est nécessaire d’avoir un robot avec un outil et l’objet 3D dans un repère pour mettre en place un projet d’usinage robot :
1-Sélectionner un robot :
a.Sélectionner Fichier➔
b.Utiliser les filtres pour trouver la marque du robot, la charge admissible, …
Par exemple, sélectionner le robot ABB IRB 2600-20/1.65 (20 Kg payload, 1.65 m reach).
c.Sélectionner Download et le robot devrait apparaitre automatiquement sur l’écran principal.
2-Sélectionner un outil :
a.Depuis la bibliothèque en ligne, utiliser le filtre Type➔Tool
b.Télécharger un outil type broche (Spindle)
c.L’outil va être automatiquement attaché au robot
Lorsque l’outil est chargé, la bibliothèque peut être fermée.
3-Ajouter un repère :
a.Sélectionner Programme➔
b.Sélectionner le nouveau repère dans l’arborescence et sélectionner F2 pour le renommer en Milling Reference
4-Ajouter un objet :
a.Sélectionner Fichier➔
b.Sélectionner un objet nommé Object wooden bowl.sld
c.Glisser et déposer l’objet sur le repère Milling Reference (dans l’arborescence de la station)