Parcours du trajet
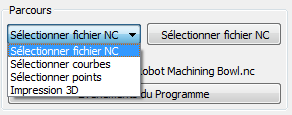
L’entrée du parcours permet de sélectionner différentes façons de définir un parcours outils. Le parcours outils peut être défini par :
●Sélectionner fichier NC : Comme un fichier NC (obtenu à l’aide d’un logiciel FAO), tel que décrit dans cette section.
●Sélectionner courbes : Comme une ou plusieurs courbes, tel que décrit dans la section Projet de suivi de courbes.
Il est possible d’importer des courbescomme une liste de coordonnées dans RoboDK.
●Sélectionner points : Un ou plusieurs points, comme décrit dans la section Projet de suivi de Point.
Il est possible d’importer des pointscomme une liste de coordonnées dans RoboDK.
●Impression 3D : Comme un objet pour l’impression 3D. Un trancheur est utilisé pour convertir la géométrie en un parcours outil.