Projet d’usinage Robot
Suivre les étapes ci-dessous pour configurer un nouveau projet d’usinage robot avec un fichier CN généré à l’aide du logiciel FAO (comme G-code ou APT) :
1.Sélectionner Utilitaires➔
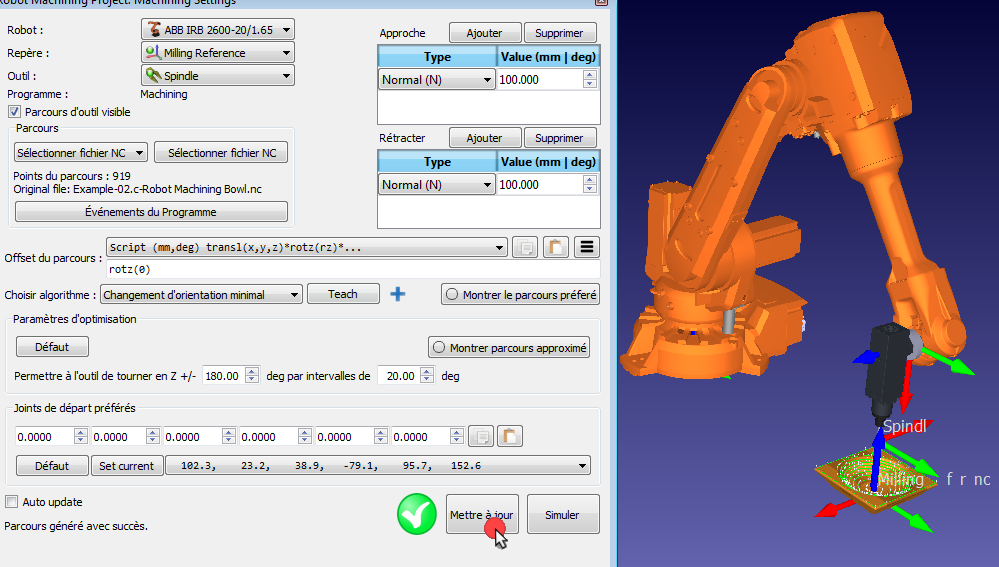
Une nouvelle fenêtre va s’ouvrir, tel que montré dans l’image suivante.
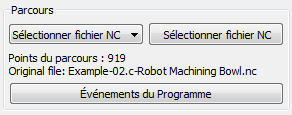
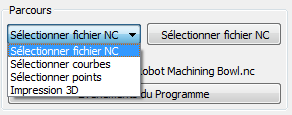
2.Sélectionner Sélectionner fichier CN dans la section parcours
3.Renseigner un fichier NC, comme celui de la bibliothèque de RoboDK :
C:/RoboDK/Library/Milling Bowl 3x.nc ou Example-02.c-Robot Machining Bowl.nc
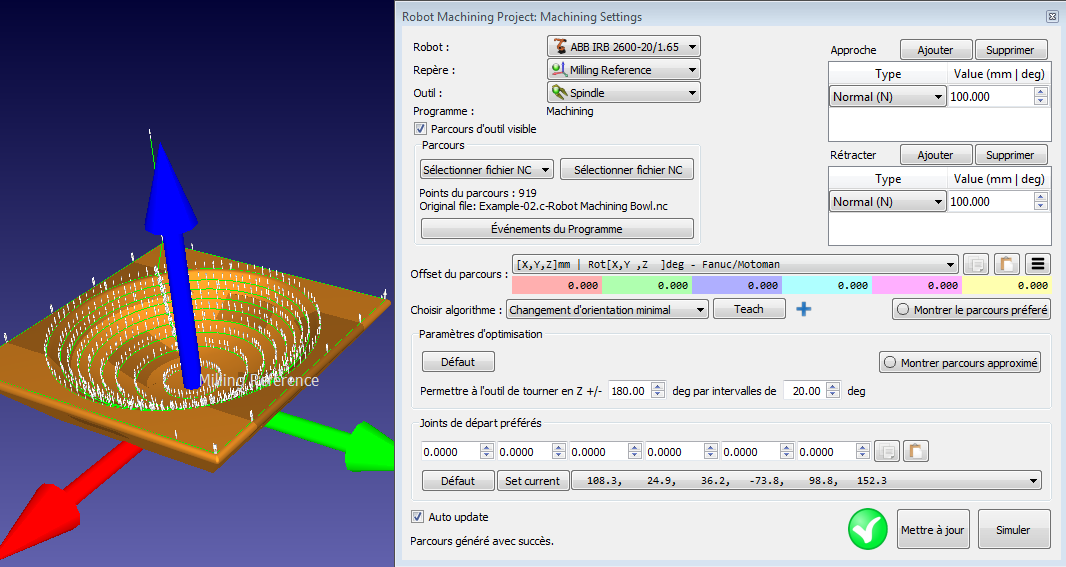
Sélectionner le robot, le repère et l’outil en haut à gauche de la fenêtre.
Le parcours outil est affiché en vert et les normales du parcours sont affichées comme des vecteurs blancs. Décocher Parcours d’outil visible pour masquer le parcours outil.
Parcours du trajet
L’entrée du parcours permet de sélectionner différentes façons de définir un parcours outils. Le parcours outils peut être défini par :
●Sélectionner fichier NC : Comme un fichier NC (obtenu à l’aide d’un logiciel FAO), tel que décrit dans cette section.
●Sélectionner courbes : Comme une ou plusieurs courbes, tel que décrit dans la section Projet de suivi de courbes.
Il est possible d’importer des courbescomme une liste de coordonnées dans RoboDK.
●Sélectionner points : Un ou plusieurs points, comme décrit dans la section Projet de suivi de Point.
Il est possible d’importer des pointscomme une liste de coordonnées dans RoboDK.
●Impression 3D : Comme un objet pour l’impression 3D. Un trancheur est utilisé pour convertir la géométrie en un parcours outil.
Approche/Rétracte
Les mouvements d’approches/de retraits peuvent être définis en haut à droite du menu.
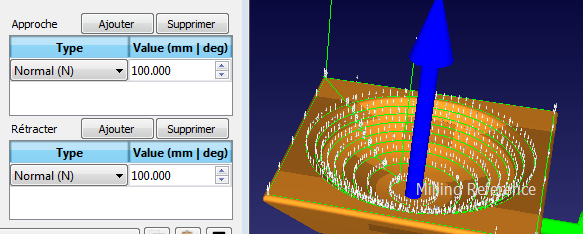
Sélectionner Ajouter pour ajouter un mouvement supplémentaire. Le parcours vert sera mis à jour en conséquence. Il est possible de choisir entre un mouvement normal (le long de la normale blanche), tangent (le long du parcours vert) ou le long d’axes spécifiques par rapport à la pièce.
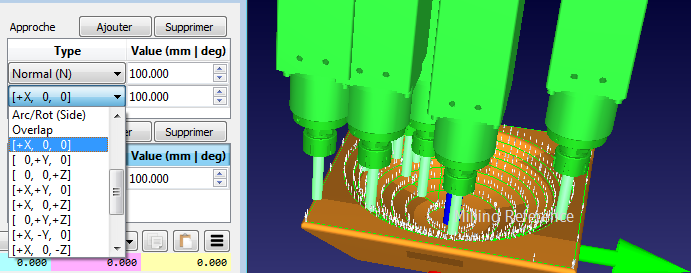
Double-cliquer sur la valeur pour modifier la longueur ou sélectionner Supprimer pour supprimer un mouvement spécifique.
Trajectoire de décalage outil
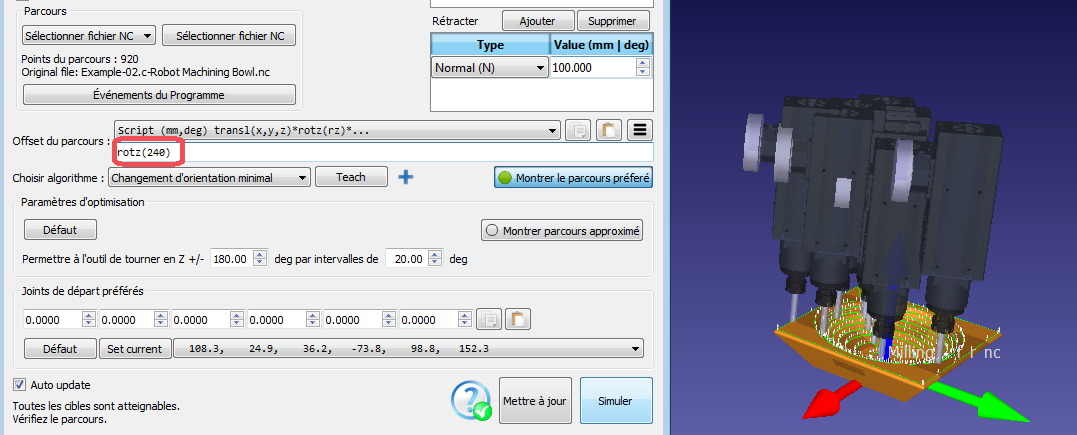
La trajectoire de décalage outil permet de modifier l’orientation préférée de l’outil le long du parcours outils. Cette option est principalement utilisée pour faire tourner l’outil autour de l’axe Z du TCP.
Dans le cadre d’un robot 6 axes utilisé pour suivre un programme de fabrication CNC à 3 ou 5 axes, il y a un degré supplémentaire de liberté à définir. Ce degré de liberté est généralement la rotation autour de l’axe Z du TCP.
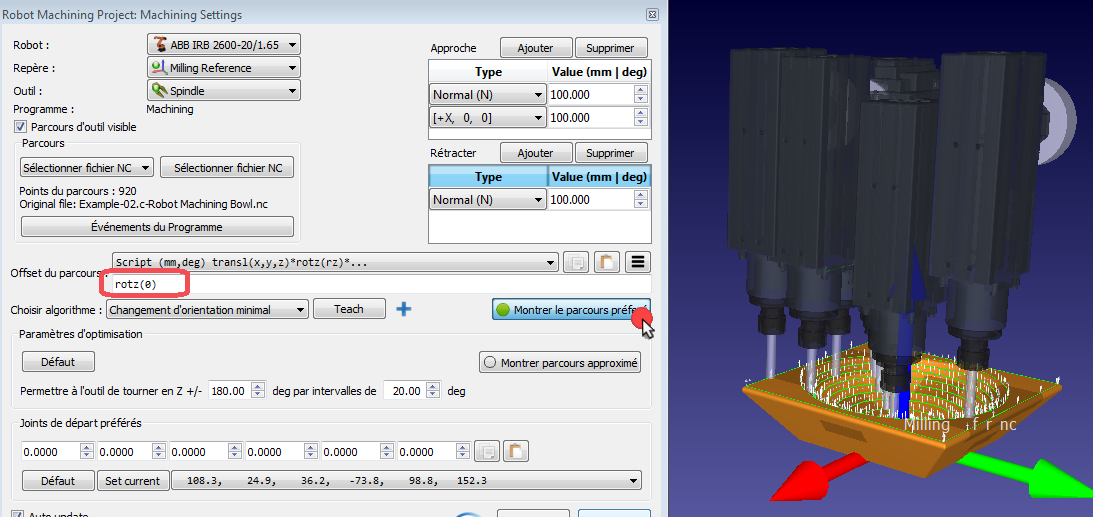
Par défaut, le parcours de décalage de l’outil affiche une transformation rotz(0). Cette valeur peut être modifiée pour établir l’orientation préférée de l’outil, en modifiant l’orientation autour de l’axe Z du TCP ou en combinaison avec d’autres axes. L’orientation préférée est l’orientation que le robot tentera de conserver tout en suivant le parcours outils.
Par défaut, RoboDK utilise l’algorithme de changement d’orientation minimal. Cela signifie que l’orientation de l’outil est maintenue aussi constante que possible le long du parcours outil. En général, cette option est adaptée aux opérations de fraisage car elle minimise les mouvements de l’articulation du robot.
D’autres algorithmes/méthodes sont disponibles, comme l’orientation de l’outil suivant le parcours (utile pour les applications de coupe), ou le robot tenant l’objet si le parcours outil se passe en pièce portée (par exemple, pour les applications de dépose de produits ou de polissage).
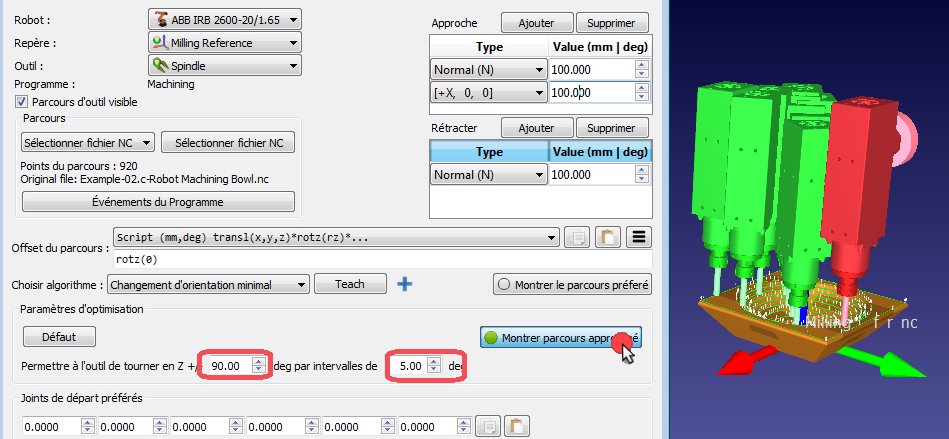
Optimisation de paramètres
Même avec une orientation privilégiée (préférée), le robot peut avoir une certaine liberté pour tourner autour de l’axe Z de l’outil. Cela permet au robot d’accomplir le programme en évitant les singularités et les contraintes d’axe. Par défaut, RoboDK permet à l’outil de pivoter jusqu’à +/-180 degrés autour de l’axe TCP par incréments de 20 degrés.
Il est recommandé de limiter cette rotation en fonction de l’application. Par exemple, il est possible d’entrer +/-90 degrés pour limiter de moitié la rotation autorisée.
Si certains points du parcours ne sont pas accessibles, il est recommandé de déplacer le repère ou d’être plus permissif avec la rotation de l’outil Z. Le repère peut être déplacé en maintenant la touche Alt enfoncée.
Mise à jour du programme
Sélectionner Mettre à jour pour obtenir le programme selon les paramètres définis. Une coche verte s’affiche si le programme peut être créé avec succès. Un nouveau programme apparait alors dans la station.
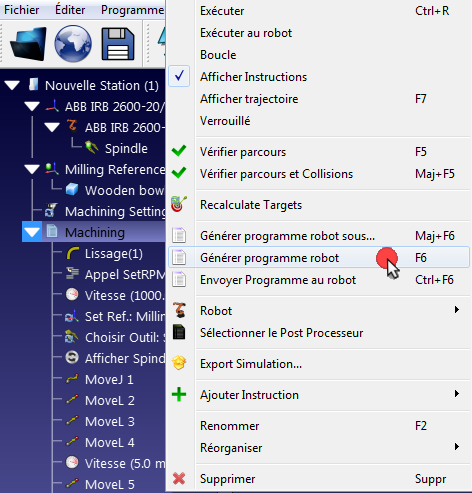
Double-cliquer sur le programme généré 
Faire un clic droit sur le programme et sélectionner Générer programme robot (F6) pour obtenir le programme. Plus d’informations sur la génération de programme dans la section Programme.
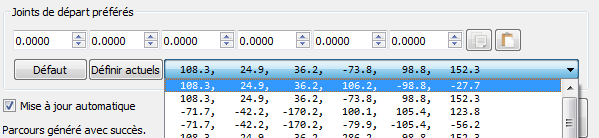
Configuration préférée
RoboDK sélectionne automatiquement la configuration de départ la plus proche des articulations de départ préférés (joints de départ préférés pour la position de démarrage). À partir de ce moment, le robot suivra les mouvements linéaires, de sorte que la configuration du robot ne change pas.
Un menu déroulant affichera toutes les solutions possibles pour démarrer le programme. Si nécessaire, sélectionner une configuration préférée et sélectionner Update pour recalculer le programme.