Projet de suivi de courbes
Il est possible de faire suivre des courbes à un robot dans l’espace 3D avec RoboDK. Les courbes dans RoboDK peuvent être sélectionnées à partir des bords des objets ou importées comme liste de points dans les fichiers CSV. Cette option est utile pour les applications de soudage par robots par exemple.
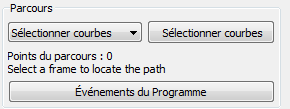
Sélectionner Utilitaires➔Suivi de courbes afin d’ouvrir les paramètres de suivi de courbes. Ces paramètres sont les même qu’un Projet d’usinage robot, la seule différence est que pour le Parcours le paramètre est défini sur Sélectionner courbes.
Sélectionner Sélectionner courbes pour choisir les courbes sur l’écran.
Sélectionner les courbes avec un clic gauche de la souris. Sélectionner deux fois la même courbe va changer la direction du mouvement. De plus, un clic droit sur une courbe précédemment sélectionnée permet de changer le sens ou de désélectionner une courbe précédemment sélectionnée.
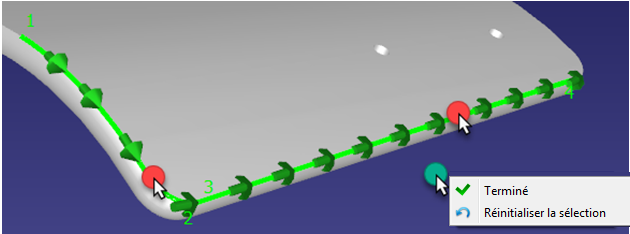
Faire un clic droit sur l’écran et sélectionner Terminé ou appuyer sur Echap pour retourner au menu. Le parcours vert affichera le mouvement du robot par rapport à l’objet.
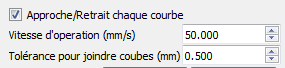
Certaines options supplémentaires sont disponibles en haut à droite des réglages, comme la vitesse de l’outil et si les mouvements d’approche/retrait doivent être appliqués pour chaque courbe. Les paramètres par défaut sont affichés dans l’image suivante :
Importer des Courbes
Les courbes peuvent être importées dans RoboDK à partir d’un fichier CSV ou d’un fichier texte en sélectionnant Utilitaires➔Importer Courbe. Un nouvel élément apparaîtra dans la station montrant la courbe comme un objet.
Le fichier peut être un fichier texte avec les coordonnées 3D de chaque point de la courbe. En option, l’orientation de l’axe Z de l’outil peut être définie comme un vecteur i,j,k.
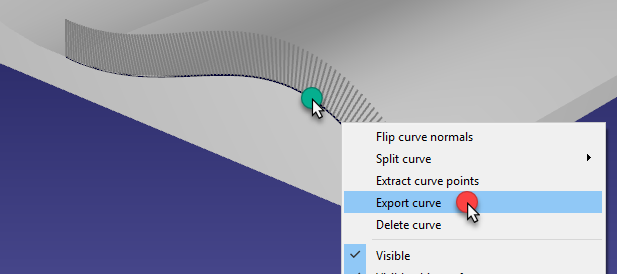
En option, les courbes existantes d’un objet peuvent être exportées sous forme de fichier CSV (faire un clic droit sur une courbe, puis sélectionner Exporter la courbe), modifiées et réimportées dans RoboDK.