Trajectoire de décalage outil
La trajectoire de décalage outil permet de modifier l’orientation préférée de l’outil le long du parcours outils. Cette option est principalement utilisée pour faire tourner l’outil autour de l’axe Z du TCP.
Dans le cadre d’un robot 6 axes utilisé pour suivre un programme de fabrication CNC à 3 ou 5 axes, il y a un degré supplémentaire de liberté à définir. Ce degré de liberté est généralement la rotation autour de l’axe Z du TCP.
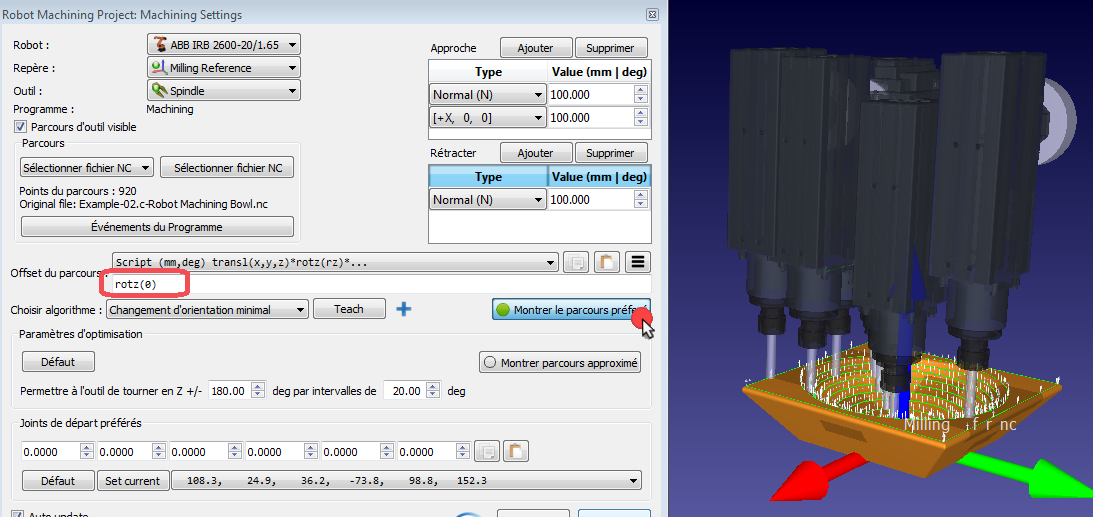
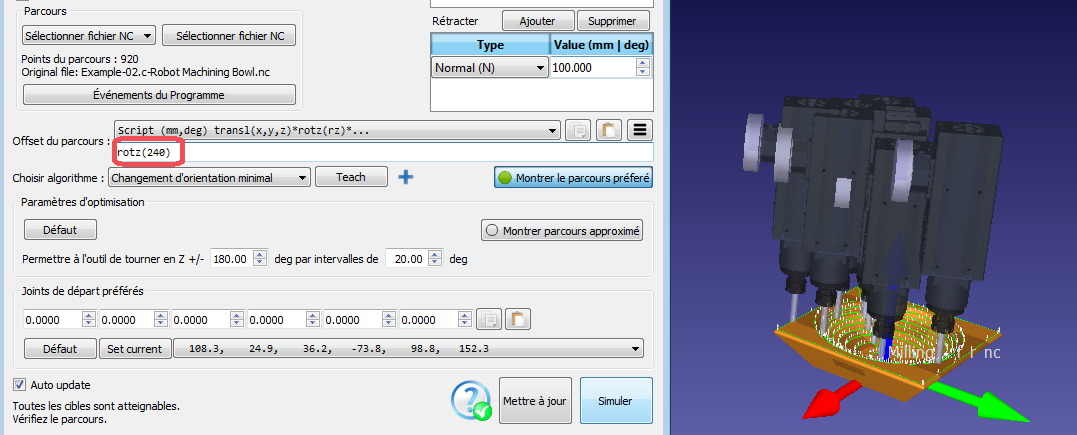
Par défaut, le parcours de décalage de l’outil affiche une transformation rotz(0). Cette valeur peut être modifiée pour établir l’orientation préférée de l’outil, en modifiant l’orientation autour de l’axe Z du TCP ou en combinaison avec d’autres axes. L’orientation préférée est l’orientation que le robot tentera de conserver tout en suivant le parcours outils.
Par défaut, RoboDK utilise l’algorithme de changement d’orientation minimal. Cela signifie que l’orientation de l’outil est maintenue aussi constante que possible le long du parcours outil. En général, cette option est adaptée aux opérations de fraisage car elle minimise les mouvements de l’articulation du robot.
D’autres algorithmes/méthodes sont disponibles, comme l’orientation de l’outil suivant le parcours (utile pour les applications de coupe), ou le robot tenant l’objet si le parcours outil se passe en pièce portée (par exemple, pour les applications de dépose de produits ou de polissage).