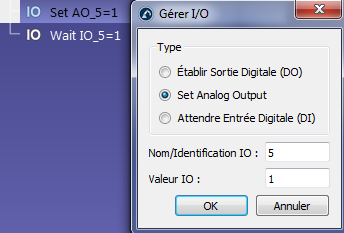
Gérer les I/O
Sélectionner Programme➔
Le nom IO peut être un nombre ou un texte s’il s’agit d’une variable nommée. La valeur IO peut être un nombre (0 pour False et 1 pour True) ou un texte s’il est nommé.
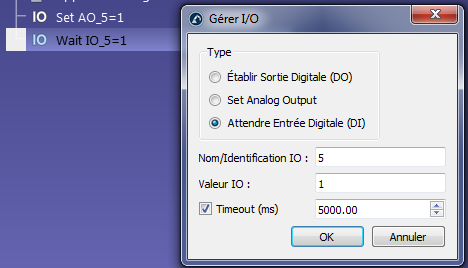
Paramétrer à Attendre Entrée Digitals (DI) pour stopper l’exécution du programme jusqu’à ce que l’Entrée attendue soit activée. De plus, la plupart des contrôleurs ont un « timeout delay » qui déclenche une erreur si le temps attendu dépasse une certaine valeur. Activer la case Timeout (ms) pour actionner cette option.
La modification des entrées et sorties numériques simulées créera de nouvelles variables de station. Pour vérifier l’état de ces variables, faire un clic droit sur la station et sélectionner Paramètres de station. Il est également possible de lire ou de modifier ces variables via l’API.