Mouvement circulaire - Circular Move
Sélectionner Programme➔
A moins que deux cibles ne soient sélectionnées avant d’ajouter l’instruction, l’instruction de mouvement ne va pas créer de nouvelle cible. Il faut donc créer deux cibles supplémentaires séparément et les lier depuis l’instruction de mouvement circulaire, tels que montré dans l’image ci-dessous.
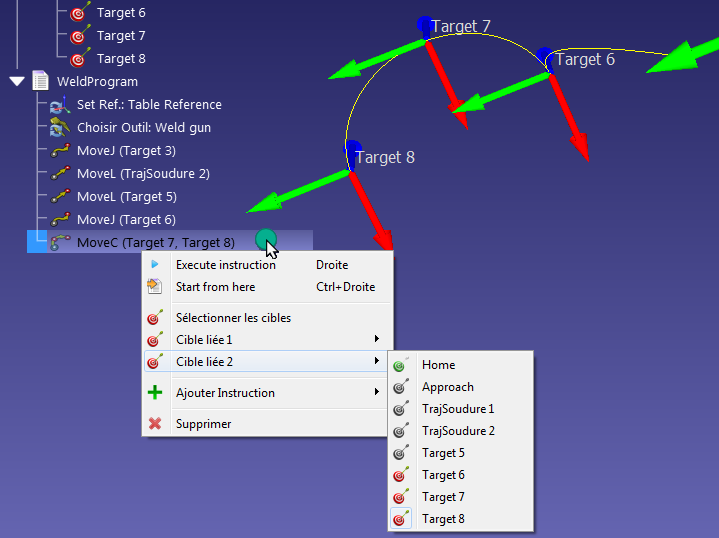
La trajectoire circulaire est un arc créé du point où le robot est localisé, passant par le premier point (Cible liée 1) et terminant au point final (Cible liée 2).
Important : Il n’est pas possible d’accomplir un cercle complet avec une seule instruction circulaire. Un cercle doit être réalisé à partir de deux instructions circulaires.